 台达变频器VFD220F43A型说明书
台达变频器VFD220F43A型说明书
台达变频器VFD220F43A型说明书
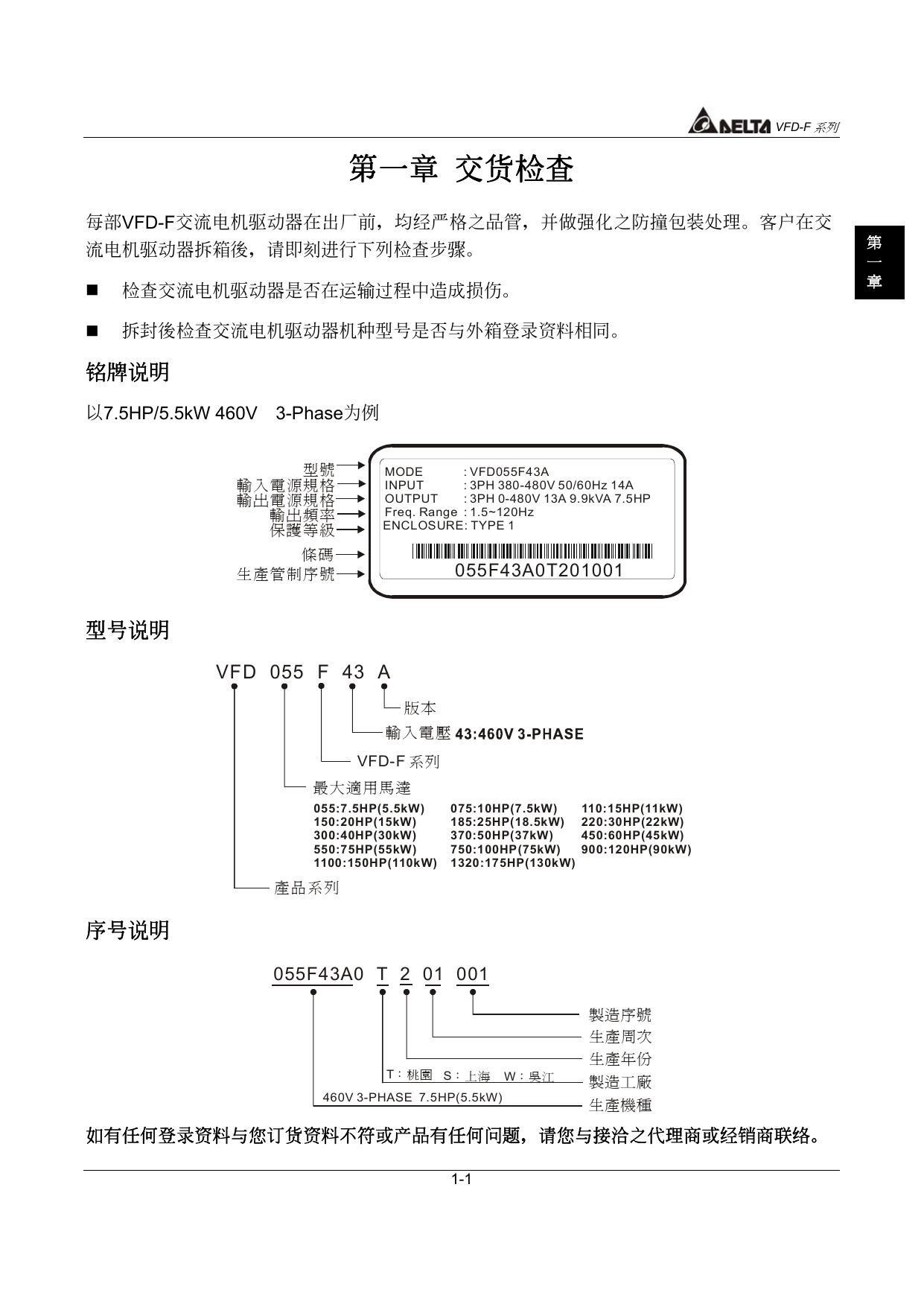
感謝您採用台達風機水泵專用型交流電機驅動器 VFD-F 系列。VFD-F 係採用高品質之元件、材 料及融合最新的微電腦控制技術製造而成。 本手冊提供給使用者安裝、參數設定、異常診斷、排除及日常維護本交流電機驅動器相關注意 事項。為了確保能夠正確地安裝及操作本交流電機驅動器,請在裝機之前,詳細閱讀本使用手 冊,並請妥善保存及交由該機器的使用者。 警告 危險 交流電機驅動器乃精密的電力電子產品,為了操作者及機械設備的安全,請務必交由專業的電 機工程人員安裝試車及調整參數,本手冊中有”危險”、”注意”等符號說明的地方請務必仔細研讀, 若有任何疑慮的地方請連絡本公司各地的代理商洽詢,我們的專業人員會樂於為您服務。 以下為特別需要注意的事項: 危險! 1. 實施配線,務必關閉電源。 2. 切斷交流電源後,交流電機驅動器數字操作器指示燈未熄滅前,表示交流電機驅動內部仍有 高壓十分危險,請勿觸摸內部電路及零組件。 3. 絕對不可以自行改裝交流電機驅動器內部的零件或線路。 4. 絕不可將交流電機驅動器輸出端子 U/T1、V/T2、W/T3 連接至 AC 電源。 5. 交流電機驅動器端子 務必正確的接地。460V 系列特種接地。 警告! 1. 請勿對驅動器內部的零組件進行耐壓測試,因驅動器所使用的半導體易受高壓擊穿而損壞。 2. 驅動器的電路板有 cmos IC 極易受靜電的破壞,故在未做好防靜電措施前請勿用手觸摸電路 板。 3. 即使電機是停止的,驅動器的主回路端子仍然可能帶有危險的高壓。 VFD-F 系列 4. 只有合格的電機專業人員才可以安裝、配線及修理保養驅動器。 注意! 5. 當驅動器某些功能被設定後,可能在電源輸入後會立即起動電機開始運轉。 6. 請選擇安全的區域來安裝交流電機驅動器,防止高溫及日光直接照射,避免溼氣和水滴的潑 濺。 7. 請防止小孩或一般無關民眾接近交流電機驅動器。 8. 本交流電機驅動器只能用在本公司所認可的場合,未經認可的使用環境可能導致火災、氣爆、 感電等事件。 9. 當交流電機驅動器與電動機之間的配線過長時,對電機的層間絕緣可能產生破壞,請改用變 頻器專用的交流電機,或在驅動器及交流電機之間加裝電抗器,避免造成交流電機因絕緣破 壞而燒燬。(電抗器詳細規格請與本公司或當地代理商人員洽談)。 10. 驅動器所安裝之電源系統額定電壓不可高於 480V,電流不可超大於 10000A RMS。 VFD-F 系列 目錄 第一章 交貨檢查……………………………………………………………………………..….…1-1 第二章 儲存及安裝…………………………………………………………...…..……….….……2-1 第三章 配線………………………………………………………………………………….….….3-1 第四章 數字操作器按鍵說明……………………………………………………………….……..4-1 第五章 功能‧參數說明………………………………………………………………………..…..5-1 第六章 功能‧參數說明一覽表…………………………………………………………….….…..6-1 第七章 錯誤訊息指示與故障排除…………………………………………………………..……..7-1 第八章 標準規格……………………………………………………………………………..……..8-1 第九章 煞車電阻選用…………………………………………………………..…………………..9-1 VFD-F 系列 第一章 交貨檢查 每部VFD-F交流電機驅動器在出廠前,均經嚴格之品管,並做強化之防撞包裝處理。客戶在交 第 一 章 流電機驅動器拆箱後,請即刻進行下列檢查步驟。 檢查交流電機驅動器是否在運輸過程中造成損傷。 拆封後檢查交流電機驅動器機種型號是否與外箱登錄資料相同。 銘牌說明 以7.5HP/5.5kW 460V 3-Phase為例 型號 輸入電源規格 輸出電源規格 輸出頻率 保護等級 MODE : VFD055F43A INPUT : 3PH 380-480V 50/60Hz 14A OUTPUT : 3PH 0-480V 13A 9.9kVA 7.5HP Freq. Range : 1.5~120Hz ENCLOSURE: TYPE 1 條碼 生產管制序號 055F43A0T201001 型號說明 VFD 055 F 43 A 版本 輸入電壓 VFD-F 系列 最大適用馬達 055:7.5HP(5.5kW) 150:20HP(15kW) 300:40HP(30kW) 550:75HP(55kW) 1100:150HP(110kW) 075:10HP(7.5kW) 185:25HP(18.5kW) 370:50HP(37kW) 750:100HP(75kW) 1320:175HP(130kW) 110:15HP(11kW) 220:30HP(22kW) 450:60HP(45kW) 900:120HP(90kW) 產品系列 序號說明 055F43A0 T 2 01 001 製造序號 生產周次 生產年份 T:桃園 S:上海 460V 3-PHASE 7.5HP(5.5kW) W:吳江 製造工廠 生產機種 如有任何登錄資料與您訂貨資料不符或產品有任何問題,請您與接洽之代理商或經銷商聯絡。 1-1 VFD-F 系列 第二章 儲存及安裝 儲存 本品在安裝之前必須置於其包裝箱內,若該機暫不使用,為了使該品能夠符合本公司的保固範圍 內以及日後的維護,儲存時務必注意下列事項: 9 必須置於無塵垢、乾燥之位置。 9 儲存位置的環境溫度必須在 -20℃ 到 +65℃ 範圍內。 9 儲存位置的相對濕度必須在 0% 到 95% 範圍內,且無結露。 9 避免儲存於含有腐蝕性氣、液體之環境中。 9 最好適當包裝存放在架子或台面。 安裝方向與空間 為了使冷卻循環效果良好,必須將變頻器安裝在垂直方向,因變頻器底部裝有散熱裝置,其上下 左右與相鄰的物品和擋板(牆)必須保持足夠的空間。如下圖所示: 150mm 50mm VFD-F F H U VFD-PU 01 RUN STOPJOG FWD REV JOG RUN STOP RESET 50mm 冷空氣 150mm 安裝環境 ▲ 無水滴、蒸氣、灰塵及油性灰塵之場所。 ▲ 無腐蝕、易燃性之氣、液體。 ▲ 無漂浮性的塵埃及金屬微粒。. ▲ 堅固無振動之場所。 ▲ 無電磁雜訊干擾之場所。 ▲ 使用環境溫度為-10℃∼40℃。若環境溫度超過 40℃以上時,請置於通風良好之場所。 2-1 第 二 章 VFD-F 系列 外型尺寸 VFD055F43A VFD075F43A 244.3 [9.63] .7 R2 ] .11 0 R 5[ X) ](2 0 1.1 34. 0[ 1.3 4](2 X) UNIT : mm(inch) 2-2 ] .22 0 [ 5.5 8.3 [0.33] .0[ 28 191.7 [7.55] 272.1 [10.72] 150.0 [5.91] 135.0 [5.32] VFD-F 系列 VFD110F43A VFD150F43A Unit: mm (inches) 第 二 章 2-3 VFD-F 系列 VFD185F43A VFD220F43A VFD300F43A 250.0 [9.84] 10.0 [ 0.39] 205.4 [8.08] 42. 0[ 403.8 [15.90] 5] 1.6 ) (2X 13.0 [0.51] 28 .0[ 1.1 0] 384.0 [15.12] 226.0 [8.90] 2-4 10.0 [0.39] VFD-F 系列 VFD370F43A VFD450F43A VFD550F43A Unit: mm (inches) 370.0 [14.57] 260.0 [10.24] 第 二 章 589.0 [23.19] 560.0 [22.05] 335.0 [13.19] 18.0 [0.71] 21.0[0.83] 132.5 [5.22] R6.5[0.25] 13.0[0.51] 2-5 VFD-F 系列 VFD750F43A VFD900F43A Unit: mm (inches) 370.0 [14.57] 260.0 [10.24] 589.0 [23.19] 560.0 [22.05] 18.0 [0.71] 132.5 [5.22] 21.0[0.83] 595.0 [23.43] 335.0 [13.19] R6.5[0.25] 13.0[0.51] 2-6 VFD-F 系列 數字操作器VFD-PU01機構尺寸 Unit: mm (inches) 19.0 [0.75] 73.0 [2.87] 44.0 [1.73] M4* 0.7(2X) STOP 6.5 [0.26] RUN 97.0 [3.82] 77.0 [3.03] PROG DATA ] 58 [1. .0 40 MODE ? JOG 110.0 [4.33] 第 二 章 2-7 VFD-F 系列 第三章 配線 基本配線圖 交流電機驅動器配線部份,分為主回路及控制回路。用戶可將外殼的蓋子掀開,此時可看到主回 路端子及控制回路端子,用戶必須依照下列之配線回路確實連接。 下圖為VFD-F出廠時交流電機驅動器的標準配線圖: 7.5~20HP機 種 適 用 直流電抗器*1 制動電阻*2 第 三 章 VFDB 制動單元*3 短路片 無熔絲斷路器 +1 R/L1 S/L2 T/L3 MC R S T NFB +2/B1 - B2 VFD-F U/T1 V/T2 W/T3 電機 M 3~ SA RB1 異常或電源瞬間 斷路保護建議線路 ON OFF MC 0-5V 5kohm 2 1 6←1 RS-485 串列通信 Sw2 0-10V +24V FWD REV EF Mi1 Mi2 Mi3 Mi4 Mi5 Mi6 Mi7 Mi8 DCM Sink Sw1 多機能接點輸出 RB1 240VAC 2.5A 120VAC 5A 28VDC 5A RC1 出廠設定為無功能 RA2 Source 出廠設定為無功能 RB2 多 機能輸 入 端 子 出廠設 定 正轉/停止 反轉/停止 外部異常 多段速指令1 多段速指令2 多段速指令3 多段速指令4 異常重置 寸動運轉 禁止加減速 1/2加減速切換 數字信號共同端子 *以上信號不可直接加入電壓 3 RA1 RC1 RC2 AFM1 AFM2 *4 +10V 頻率設定用電源 +10V 20mA AVI 模擬指令 0~10V/5V(47kohm) 4~20mA ACi1 (250ohm) 4~20mA ACi2 (250ohm) 模擬信號共同端 ACM *1~4均為選購品 3-1 ACM Ry01 RA3 RC3 RA4 RC4 RA5 RC5 RA6 RC6 RA7 RC7 RA8 RC8 Relay B.D. 多機能模擬輸出端子 出廠設定為輸出頻率 0~10VDC/2mA 出廠設定為輸出電流 0~20mA/4~20mA 最大阻抗500Ω 模擬信號共同端 VFD-F 系列 25HP以上 機 種 適 用 VFDB 直流電抗器*1 制動單元*3 B1 P N B2 制動電阻*2 短路片 無熔絲斷路器 +1 R/L1 S/L2 T/L3 MC R S T NFB - +2 電機 U/T1 VFD-F M 3~ V/T2 W/T3 SA RB1 異常或電源瞬間 斷路保護建議線路 ON OFF MC 0-5V 5kohm 2 1 6←1 RS-485 串列通信 Sw2 0-10V +24V FWD REV EF Mi1 Mi2 Mi3 Mi4 Mi5 Mi6 Mi7 Mi8 DCM Sink Sw1 多機能接點輸出 RB1 240VAC 2.5A 120VAC 5A 28VDC 5A RC1 出廠設定為無功能 RA2 Source 出廠設定為無功能 RB2 多機 能 輸 入端 子 出廠設定 正轉/停止 反轉/停止 外部異常 多段速指令1 多段速指令2 多段速指令3 多段速指令4 異常重置 寸動運轉 禁止加減速 1/2加減速切換 數字信號共同端子 *以上信號不可直接加入電壓 3 RA1 RC1 RC2 AFM1 AFM2 *4 Ry01 +10V 頻率設定用電源 +10V 20mA AVI 模擬指令 0~10V/5V(47kohm) 4~20mA ACi1 (250ohm) 4~20mA ACi2 (250ohm) 模擬信號共同端 ACM ACM 多機能模擬輸出端子 出廠設定為輸出頻率 0~10VDC/2mA 出廠設定為輸出電流 0~20mA/4~20mA 最大阻抗500Ω 模擬信號共同端 RA3 RC3 RA4 RC4 RA5 RC5 RA6 RC6 RA7 RC7 RA8 RC8 Relay B.D. *1~4均為選購品 主回路端子說明 端子記號 R/L1, S/L2, T/L3 內容說明 商用電源輸入端 U/T1, V/T2, W/T3 交流電機驅動器輸出與感應電動機接續 +1,+2 功率改善DC電抗器接續端,安裝時請將短路片拆除 +2/B1-B2 煞車電阻連接端子,請依選用表選購 +2-+2/B1-N 煞車制動模組接續端(VFDB系列) 3-2 VFD-F 系列 接地端子,請依電工法規460V系列特種接地 控制端子標示說明 端子記號 FWD REV 端子功能說明 正轉運轉-停止指令 反轉運轉-停止指令 出廠設定 EF MI1 外部異常輸入 多功能輸入選擇一 出廠設定為多段速一指令 MI2 MI3 多功能輸入選擇二 多功能輸入選擇三 出廠設定為多段速二指令 出廠設定為多段速三指令 MI4 多功能輸入選擇四 出廠設定為多段速四指令 MI5 MI6 MI7 MI8 多功能輸入選擇五 多功能輸入選擇六 多功能輸入選擇七 多功能輸入選擇八 出廠設定為異常重置指令 出廠設定為寸動運轉 出廠設定為加減速禁止指令 出廠設定為加減速時間切換1 +24V 20mA +24V DCM RA1 RB1 數字控制信號的共同端(Source) 數字控制信號的共同端(Sink) 多功能Relay1輸出接點(常開a) 多功能Relay1輸出接點(常閉b) RC1 多功能Relay1輸出接點共同端 RA2 RB2 多功能Relay2輸出接點(常開a) 多功能Relay2輸出接點(常閉b) RC2 多功能Relay2輸出接點共同端 +10V AVI ACI1/2 AFM1 AFM2 ACM 240VAC 2.5A 120VAC 5A 28VDC5 A +10V 20mA 速度設定用電源 0∼+10V對應最高操作頻率 模擬電壓頻率指令 4∼20mA對應最高操作頻率 模擬電流頻率指令 0~10V對應最高操作頻率 多機能模擬電壓輸出1 0∼20mA,4∼20mA對應2倍輸出電流 多機能模擬電壓輸出2 模擬控制信號共同端 * 模擬控制訊號線規格:18 AWG (0.75 mm2),遮避隔離絞線。 主回路端子重要事項: 機種 扭力 線 徑 15-20HP 7.5-10HP 18kgf-cm 30kgf-cm 10-18AWG 10-18AWG 25-40HP 30kgf-cm 10-18AWG 3-3 50-60HP 75-100HP 57kgf-cm(Min.) 200kgf-cm(Min.) 50HP:2/0-3/0AWG 75HP:1/0∼4/0AWG 60HP:3/0AWG 100HP:3/0∼4/0AWG 第 三 章 VFD-F 系列 線 種 類 備 註 Stranded Stranded Stranded copper only copper only copper only Stranded copper only Stranded copper only 可使用線徑可 使 用 線 徑 no.6AWG , no.1AWG , 但 但 要 搭 配 使 要搭配使用UL 用 UL 承 認 的 承 認 的 環 狀 端 環狀端子。 子。 配線注意事項 ; 配線時,配線線徑規格之選定,請依照電工法規之規定施行配線,以策安全。 ; 三相交流輸入電源與主回路端子(R/L1,S/L2,T/L3)之間的連線一定要接一個無熔絲開關。最 好能另串接一電磁接觸器 (MC) 以在交流電機驅動器保護功能動作時可同時切斷電源。 (電 磁接觸器的兩端需加裝R-C 突波吸收器)。 ; 輸入電源 R/L1,S/L2,T/L3 並無相序分別,可任意連接使用。 ; 接地端子 E 以特種地方式接地。 ; 交流電機驅動器接地線不可與電銲機、大馬力電機等大電流負載共同接地,而必須分別接 地。 ; 接地配線必須愈短愈好。 ; 數台交流電機驅動器共同接地時,勿形成接地回路。參考下圖: 正轉 ; 若將交流電機驅動器輸出端子 U/T1,V/T2,W/T3 相對連接至電機 U/T1,V/T2,W/T3 端子, 則交流電機驅動器數字控制面板上正轉 (FWD) 指示燈亮,則表示交流電機驅動器執行正 轉,電機旋轉方向如上右圖所示:若逆轉 (REV) 指示燈亮,則表示交流電機驅動器執行反 轉,旋轉方向與上圖相反。若無法確定交流電機驅動器輸出端子 U/T1,V/T2,W/T3 連接至 電機 U/T1,V/T2,W/T3 端子是否一對一連接,如果交流電機驅動器執行正轉時,電機為反 轉方向,只要將電機 U/T1,V/T2,W/T3 端子中任意兩條對調即可。 ; 確定電源電壓及可供應之最大電流。 ; 當 “數字操作器” 顯示時,請勿連接或拆卸任何配線。 ; VFD-F交流電機驅動器內部並無安裝煞車電阻,在負載慣性大或頻繁啟動停止的使用場合 時,務必加裝煞車電阻,可依需要選購。 ; 不可將交流電源連接至交流電機驅動器出力側端子 U/T1,V/T2,W/T3。 ; 主回路端子的螺絲請確實鎖緊,以防止因震動鬆脫產生火花。 3-4 VFD-F 系列 ; 主回路配線與控制回路的配線必需分離,以防止發生誤動作。如必需交錯,請作成90° 度 的交叉。 ; 若交流電機驅動器出力側端子 U/T1,V/T2,W/T3有必要加裝雜訊濾波器時,必需使用電感式 L-濾波器,不可加裝進相電容器或L-C、R-C式濾波器。 ; 控制配線請儘量使用隔離線,端子前的隔離網剝除段請勿露出。 ; 電源配線請使用隔離線或線管,並將隔離層或線管兩端接地。 ; 如果交流電機驅動器的安裝場所對干擾相當敏感,則請加裝RFI濾波器,加裝位置離交流電 機驅動器越近越好。PWM的載波頻率越低,干擾也越少。 ; 交流電機驅動器若有加裝漏電斷路器以作為漏電故障保護時,為防止漏電斷路器誤動作, 請選擇感度電流在200mA以上,動作時間為0.1秒以上者。 3-5 第 三 章 VFD-F 系列 第四章 數字操作器按鍵說明 VFD-PU01 數字操作器 VFD-PU01 各部說明 F H U 主顯示區 可顯示頻率、電流、電壓、轉向 、使用者定義單位、異常等 VFD-PU01 操作器型號 RUN STOP JOG FWD REV 狀態顯示區 分別可顯示驅動器的運轉狀態 運轉 、 停止 、 寸動 、 正轉 、 反轉等 寸動運轉鍵 按此鍵可執行寸動頻率運轉 顯示畫面選擇鍵 JOG 按此鍵顯示項目逐次變更以供選擇 數值變更鍵 參數資料設定鍵 設定值及參數變更使用 用以讀取修改驅動器的各項參數設定 停止/重置鍵 數值左移鍵 方便於修改數值大的設定值 RUN 可令驅動器停止運轉及異常重置 STOP RESET 運轉鍵 可令驅動器執行運轉 功能顯示項目說明 顯示項目 說明 顯示驅動器目前的設定頻率。 顯示驅動器實際輸出到電機的頻率。 顯示用戶定義之物理量 (U = F x 00-05) 顯示負載電流 4-1 第 四 章 VFD-F 系列 顯示項目 說明 正轉命令 反轉命令 顯示計數值 顯示參數項目 顯示參數內容值 外部異常顯示 若由顯示區讀到 End 的訊息(如左圖所示)大約一秒鐘, 表示資料已被接受並自動存入內部記憶體 若設定的資料不被接受或數值超出時即會顯示 4-2 VFD-F 系列 數字操作器 VFD-PU01 操作流程 畫面選擇 F START F H H U F H U F H U U F H U GO START 重點:在畫面選擇模式中 進入參數設定 參數設定 可下移至前次畫面 F H U F H U F H U F H U F H U 顯示輸入 資料正確 顯示輸入 資料錯誤 可上移至前次畫面 重點:在 參數設定 模式中 第 四 章 可返回畫面選擇模式 資料位移 START F F F F F F H U F H U H U H U F H U H U 資料修改 F START H U H U H U 轉向設定 F H U or or 4-3 F H U VFD-F 系列 第五章 功能、參數說明 此節將對所有的功能參數做詳細的說明。 依參數的屬性區分為 12 個參數群;使參數設定上更加容易,在大部份的應用中,使用者可根據 參數群中相關的參數設定,完成啟動前的設定。 12 個參數群如下所示: 00:用戶參數 01:基本參數 02:操作方式參數 03:輸出功能參數 04:輸入功能參數 05:多段速參數 06:保護參數 07:電機參數 08:特殊參數 09:通訊參數 第 五 章 10:回授控制參數 11:風機、水泵控制參數 5-1 VFD-F 系列 00 驅動器狀態參數 00-00 軟體版本 出廠設定值 ## 出廠設定值 00 出廠設定值 00 此參數顯示驅動器之軟體版本。 00-01 驅動器狀態指示一 設定範圍 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 無異常記錄 oc(過電流) ov(過電壓) oH(過熱) oL(驅動器過載) oL1(電子熱動電驛) EF(外部異常) occ(驅動模組異常) CF3(硬體線路異常) HPF(保護線路異常) ocA(加速中過電流) ocd(減速中過電流) ocn(恆速中過電流) GFF(接地故障) Lv(低電壓) CF1(寫入異常) CF2(讀出異常) bb(外部遮斷) oL2(電機過載) 保留 codE(軟體或密碼保護) EF1(外部緊急停止) PHL(欠相) Lc(低電流) Fbl(回授信號錯誤) 此參數顯示驅動器目前之狀態。 00-02 驅動器狀態指示二 設定內容 Bit 0~1 Bit 2 00B:RUN LED OFF,STOP LED ON 01B:RUN LED BLINK,STOP LED ON 10B:RUN LED ON,STOP LED BLINK 11B:RUN LED ON,STOP LED OFF 00B:JOG OFF 01B:JOG ON 5-2 VFD-F 系列 Bit 3~4 00B:REV LED OFF,FWD LED ON 01B:REV LED BLINKFWD LED ON 10B:REV LED ON,FWD LED BLINK 11B:REV LED ON, FWD LED OFF Bit 5-7 保留 Bit 8 主頻率來源由通信界面 Bit 9 主頻率來源由模擬輸入 Bit10 運轉指令由通信界面 Bit11 參數鎖定 Bit12 保留 Bit13 保留 Bit14~15 保留 00-03 設定頻率 此參數顯示使用者設定之頻率命令。 00-04 輸出頻率 第 五 章 此參數顯示驅動器實際輸出之頻率。 00-05 輸出電流 此參數顯示驅動器實際輸出之電流值。 00-06 DC-BUS 電壓 此參數顯示驅動器 DC-BUS 電壓。 00-07 輸出電壓 此參數顯示驅動器實際輸出之電壓。 00-08 輸出功因角 此參數顯示輸出之功因角。 00-09 輸出功率(kW) 此參數顯示驅動器輸出功率。 00-10 回授信號物理量 此參數顯示回授信號量。 00-11 回授信號(%) 5-3 VFD-F 系列 此參數顯示回授信號量與參考物理量比值。 00-12 使用者定義值(低位數) 00-13 使用者定義值(高位數) 使用者定義值 = 驅動器實際輸出頻率(00-04)×使用者定義比例設定(02-10)。 兩個顯示值合併最大可顯示 999999.99。 使用者定義值<=99.99 時,00-12=0。 5-4 VFD-F 系列 01 基本參數 01-00 最高操作頻率設定 出廠設定值 60.00 設定範圍 50.00-120.00 Hz 此參數設定驅動器最大操作頻率命令範圍。以鍵盤設定的主頻率命令以此參數設定為限制。 以模擬輸入(AVI,ACI1 與 ACI2)設定主頻率命令時,以此參數設定為參考值並以此參數設定 為限制。 參考 04-09~04-20。 01-01 最大電壓頻率設定 出廠設定值 60.00 設定範圍 0.10-120.00 Hz 此參數設定最大輸出電壓之起始頻率。若輸出頻率超出此設定,則輸出電壓將維持在最大輸 出電壓 01-02。通常此參數根據電機銘牌上所定之額定電源頻率來設定。若電機的額定電源 頻率為 60Hz 則設為 60Hz,若電機的額定電源頻率為 50Hz 則設為 50Hz。 此參數若設定值比電機額定電源頻率低,可能造成驅動器輸出電流過大,造成電機損壞或觸 發驅動器的過電流保護功能。 此參數若設定值比電機額定電源頻率高,可能會造成電機輸出扭力不足。 參考 01-02。 01-02 最高輸出電壓設定 出廠設定值 440.0 設定範圍 0.2-510.0V 此參數設定驅動器的最大輸出電壓值。通常此參數根據電機銘牌上所定之額定電源電壓設 定。若電機的額定電源電壓為 460V 則設為 460V,若電機的額定電源電壓為 380V 則設為 380V。 若驅動器的輸入電源電壓小於此設定值,輸出電壓將被限制於輸入電壓,無法達到此設定 值。 此參數若設定值比電機額定電源電壓高,可能造成驅動器輸出電流過大,造成電機損壞或 觸發驅動器的過電流保護功能。 此參數若設定值比電機額定電源電壓低,可能造成電機輸出扭力不足。 參考 01-01 與 01-22。 01-03 中間輸出電壓頻率設定 出廠設定值 設定範圍 0.10-120.00 Hz 5-5 1.50 第 五 章 VFD-F 系列 01-04 中間輸出電壓設定 出廠設定值 11.0 設定範圍 0.2V-510.0V 此參數設定驅動器輸出 V/F 曲線,通常根據電機實際負載設定。 不適當的參數設定可能造成驅動器輸出電流過大,造成電機因過熱而損壞或觸發驅動器的過 電流保護功能。 不適當的參數設定可能造成電機輸出扭力不足。 若 11-00 的設定值不為 00,中間頻率與中間輸出電壓無效。 參數設定必須符合 01-01≧01-03≧01-05。 參數設定必須符合 01-02≧01-04≧01-06。 01-05 最低輸出頻率設定 出廠設定值 1.50 設定範圍 0.10-20.00 Hz 此參數設定驅動器的最低輸出頻率。若頻率命令大於此設定值,驅動器將由此設定頻率,依 加減速時間,加速至頻率命令。若頻率命令小於此設定值,交流電機驅動器將保持待機,不 輸出電壓。 不適當的參數設定可能造成驅動器輸出電流過大,造成電機損壞或觸發驅動器的過電流保護 功能。 啟動速度追蹤功能時 02-11,08-04,驅動器啟動時將不依 V/F 曲線運轉。 01-06 最低輸出電壓設定 單位 11.0 設定範圍 0.2V-100.0V 此參數設定驅動器輸出 V/F 曲線,通常根據電機實際負載設定。 若此參數設定值過大可能造成驅動器輸出電流過大,造成電機因過熱而損壞或觸發驅動器的 過電流保護功能。 若此參數設定值過小可能造成電機輸出扭力不足。 01-07 上限頻率 出廠設定值 60.00 設定範圍 0.00-120.00 Hz 此參數設定值會限制驅動器的最大輸出頻率。當驅動器啟動轉差補償 07-02~07-05 或回授 控制 10-00~10-09 時,驅動器的輸出頻率可能會超過頻率命令,但是仍會受到此參數設定 值的限制。 5-6 VFD-F 系列 01-08 下限頻率 出廠設定值 0.00 設定範圍 0.00-120.00 Hz 此參數設定值會限制驅動器的最低輸出頻率。當驅動器的頻率命令或回授控制計算出的頻率 小於此設定值時,驅動器的輸出頻率會保持在此下限頻率設定。 驅動器啟動時會依照 V/F 曲線由最低輸出頻率加速至設定頻率,不受此參數限制。 下限頻率的設定必須小於睡眠頻率,亦即11-08≧01-08。若下限頻率的設定值大於睡眠頻 率,則驅動器會自動將睡眠頻率設定為與下限頻率相同。 輸出電壓 01-02 01-04 第 五 章 01-06 01-05 01-09 01-10 01-11 01-12 01-13 01-14 01-15 01-16 01-17 01-18 01-08 01-03 01-01 01-00 01-07 輸出頻率 第一加速時間 第一減速時間 第二加速時間 第二減速時間 第三加速時間 第三減速時間 第四加速時間 第四減速時間 JOG 加速時間 JOG 減速時間 a a a a a a a a a a 設定範圍 0.1-3600.0 s 出廠設定值 10.0/60.0 加速時間為驅動器由 0.0Hz 加速至最大操作頻率 01-00 所需時間。減速時間為驅動器由最 大操作頻率 01-00 減速至 0.0Hz 所需時間。 加減速時間設定太短可能觸發驅動器之保護功能動作(加速中過電流失速防止 06-01 或過電 壓失速防止 06-00) ,而使實際加減速時間大於此設定值。 5-7 VFD-F 系列 加速時間設定太短可能造成驅動器加速時電流過大,致使電機損壞或驅動器之保護功能動 作。 減速時間設定太短可能造成驅動器減速時電流過大或驅動器內部電壓過高,致使電機損壞或 驅動器之保護功能動作。 若要使驅動器於短時間之內減速,且避免驅動器內部電壓過高,可以採用適當之煞車模組與 煞車電阻。 啟動加減速 S 曲線時,實際的加減速時間,會較設定值為長。 第一∼四加減速時間之選擇,可以由多功能輸入端子 04-00~04-07 設定之。 01-19 JOG 頻率設定 出廠設定值 6.00 設定範圍 0.00 Hz∼120.00 Hz 使用寸動功能時,可以使用多功能輸入端子 04-00~04-07(設定為 07)或鍵盤上之 JOG 鍵。 當收到寸動命令時,驅動器便會自最低頻率設定 01-05 加速至 JOG 頻率設定 01-19。寸動 命令消失時,驅動器便會自 JOG 頻率設定 01-19 減速至停止。 寸動運轉時的加減速時間由寸動加減速時間 01-17 與 01-18 決定。 寸動運轉時驅動器不接受任何運轉命令,驅動器運轉時也不接受寸動命令。 01-20 加速 S 曲線延遲時間設定 出廠設定值 0.00 出廠設定值 0.00 設定範圍 0.00∼2.50 s 01-21 減速 S 曲線延遲時間設定 設定範圍 0.00∼2.50 s 此參數可用來設定驅動器在加減速時作無衝擊性的緩啟動與停車。使用者可設定加減速 S 曲線延遲時間來調整不同程度的加減速 S 曲線。 01-22 調變指數 a 出廠設定值 1.00 設定範圍 0.90∼1.20 此參數設定決定最大輸出電壓與輸入電壓的比值。事實上驅動器的最大輸出電壓是由最大輸 出電壓設定 01-02,調變指數 01-22 與輸入電壓共同決定。 若最大輸出電壓設定 01-02 小 於調變指數 01-22 與輸入電壓的乘積,則最大輸出電壓由 01-02 決定,反之則最大輸出電 壓由輸入電壓與 01-22 的乘積決定。 使用者可用此參數得到較輸入電壓高的輸出電壓。但是此時輸出電壓波型會產生畸變,含有 各次諧波,可能增加電機的轉矩諧波與噪音。 5-8 VFD-F 系列 01-23 加減速時間單位設定 出廠設定值 01 設定範圍 00 以 1 s 為單位 01 以 0.1 s 為單位 02 以 0.01 s 為單位 此參數設定決定加減速時間 01-09~01-18 的解析度。 較高的解析度會使加減速時間的設定範圍變小,如下表所示。 01-23 00 01 02 加減速時間單位設定 以 1 s 為單位 以 0.1 s 為單位 以 0.01 s 為單位 加減速時間設定範圍 1~36000 s 0.1~3600.0 s 0.01~360.00 s 當改變加減速時間單位設定而使加減速時間超出可設定範圍時,驅動器會自動將加減速時間 限制在可設定範圍。例如,原加減速時間設定為 28000 s,而 01-23 由 00 設為 02 時,驅動 器會自動將加減速時間改為 360.00 s。反之若原設定為 2800.0 s 則 01-23 由 00 設為 01 時, 加減速時間仍為 2800.0 s。 第 五 章 5-9 VFD-F 系列 02 操作方式參數 02-00 頻率指令來源設定 設定範圍 00 01 02 03 04 05 a 出廠設定值 00 主頻率輸入由數字操作器控制 主頻率為外部端子(AVI)輸入模擬信號 DC 0 ~ +10V 控制(10bit) 主頻率由外部端子(ACI1)輸入模擬信號 DC 4 ~ 20mA 控制(10bit) 主頻率由外部端子(ACI2)輸入模擬信號 DC 4 ~ 20mA 控制(10bit) 主頻率由 RS-485 通信界面操作(RJ-11) 主頻率由 External Reference 此參數設定驅動器主頻率來源。 設定內容 00:頻率命令來源為鍵盤輸入。使用者可在鍵盤顯示 F 時,以上下鍵來調整頻率命令。多功能 輸入端子 04-00~04-07 設為 13 或 14,Up/Down Command 時,其功能與鍵盤上下鍵相同, 可與上下鍵同時操作,設定頻率命令。 01:頻率頻率命令來源為模擬輸入端子 AVI。 02:頻率頻率命令來源為模擬輸入端子 ACI1。 03:頻率頻率命令來源為模擬輸入端子 ACI2。 04:頻率頻率命令來源為 RS485 通信接口。 05:頻率頻率命令來源為外部參考值,參考 04-24。 AVI 輸入端子可以由控制板上之 SW2 選擇 0~10V 或 0~5V 輸入。當 AVI 設定為 0~5V(10V) 輸入時,表示此模擬輸入端子的電壓輸入值是限定在 0~5V(10V),此時 5V(10V)所對應的是 最大操作頻率 01-00。 02-01 運轉指令來源設定 設定範圍 00 01 02 03 04 出廠設定值 運轉指令由數字操作器控制 運轉指令由外部端子控制,鍵盤 STOP 有效 運轉指令由外部端子控制,鍵盤 STOP 無效 運轉指令由 RS-485 通信界面操作鍵盤 STOP 鍵有效 運轉指令由 RS-485 通信界面操作鍵盤 STOP 鍵無效 a 00 此參數設定驅動器運轉信號來源。 當運轉指令來源為外部端子時,可選擇二線式或三線式運轉,參考 02-05。 02-02 停止方式 設定範圍 00 01 02 03 出廠設定值 Stop 減速停止,E.F.自由停止 Stop 自由停止,E.F.自由停止 Stop 減速停止,E.F.減速停止 Stop 自由停止,E.F.減速停止 5-10 00 VFD-F 系列 選擇減速停車時,驅動器依減速時間設定,由運轉頻率減速至最低輸出頻率並停止運轉。參 考 01-09~01-18。 選擇自由停車時,驅動器立即停止輸出,電機依其慣量與阻力自由運轉到停止。 E.F.(External Fault)為外部故障,可以經由外部端子 E.F.或多功能輸入端子 04-00~04-07 設 為 15 或 16 觸發(EF1)。 ACI 輸入斷線可能會引起 E.F.動作,參考 02-07。 頻率 頻率 輸出頻率 輸出頻率 馬達轉速 馬達轉速 時間 運轉命令 RUN 時間 馬達依慣性停止 運轉命令 馬達依減速時間停止 STOP 第 五 章 STOP RUN 減速停 止與自由運轉 停止 02-03 PWM 載波頻率選擇 a 設定範圍 1∼10kHz 單位 出廠設定值 1 ## 此參數設定驅動器的載波頻率。其出廠設定值與設定範圍與機種有關,參考07-00。 當驅動器的散熱器溫度高於設定值時,驅動器會自動調降載波頻率以減少熱損失,以避免驅 動器因過熱而跳脫,並可延長驅動器之壽命。 載波頻率與驅動器之電磁干擾,熱損失,漏電流以及電機的噪音相關,如下表所示 載波頻率 高 電機噪音 低 電磁干擾 高 漏電流 高 熱損失 高 低 高 低 低 低 載波頻率低時,驅動器的電流漣波較大,可能造成電流顯示值比實際輸出值高。 02-04 正反轉禁止 出廠設定值 設定範圍 00 可正反轉 01 禁止反轉 02 禁止正轉 5-11 00 VFD-F 系列 此參數可限制電機的運轉方向為正轉或反轉。當電機的負載只允許一固定運轉方向時,此參 數可限制電機運轉方向,以避免因誤操作導至電機反轉造成設備損壞。 02-05 二線∕三線式運轉控制 出廠設定值 00 設定範圍 00 正轉∕停止,反轉∕停止 01 反轉∕正轉,運轉∕停止 02 三線式運轉控制 此參數設定驅動器外部控制運轉的組態,共有三種不同的控制模式: 外部端子控制迴路 02-05 00 二線式 (1) 正轉 / 停止 反轉 / 停止 01 二線式 (2) 反轉 / 正轉 運轉 / 停止 FWD/STOP FWD "開" :停止,"閉":正轉 運轉 REV/STOP REV "開" :停止,"閉":反轉 運轉 DCM RUN/STOP F WD "開" :停止,"閉":運轉 FWD/REV REV "開" :正轉,"閉":反轉 DCM STOP RUN F WD ("閉":運轉) 02 三線式 FWD/REV 02-06 電源起動運轉控制 EF ("開":停止) REV (反轉/正 轉選擇 "開":正轉運 行 "閉" :反轉運行 ) DCM VFD-F 出廠設定值 01 設定範圍 00 可運轉 01 不可運轉 此參數設定當驅動器設定為由外部端子控制,且驅動器上電時外部端子已經處於運轉狀態 下,驅動器是否要執行運轉命令。 若此參數設定為 00 可運轉,驅動器上電後會立即執行外部端子的運轉命令。 若此參數設定為 01 鎖定運轉,驅動器上電時會忽略外部端子的運轉命令,保持停機狀態。 要使驅動器運轉必須先將外部端子的運轉命令解除,再重新投入運轉命令即可運轉。 參數設定為 01 鎖定運轉時,驅動器仍然可能因為開關的震動或電源干擾而執行運轉命令。 為確保人身與機器設備之安全,驅動器上電前應先檢查外部端子的狀態。 5-12 VFD-F 系列 出廠設定值 02-07 ACI(4~20mA)斷線處理 01 設定範圍 00 減速至 0Hz 運轉 01 顯示 E.F. 02 以最後的頻率命令持續運轉 此參數設定當頻率頻率命令來源或回授檢出來源設為模擬輸入端子 ACI1 或 ACI2 時,若 ACI 發生斷線,驅動器的處理程序。 此參數設定為 01 時,驅動器停車方式如 02-02 所設定。 02-08 開機狀態預設 設定範圍 a 出廠設定值 00 Bit0~1 00B = F LED 01B = H LED 10B = U LED (特殊顯示) 11B = Fwd / Rev Bit2 0B = Fwd LED 1B = Rev LED Bit3~5 000B = 1st 7-seg 001B = 2nd 7-seg 010B = 3rd 7-seg 011B = 4th 7-seg 100B = 5th 7-seg Bit6~7 保留 第 五 章 此參數設定驅動器開機時,鍵盤的顯示畫面。 以設定值 21 = 00010101B 為例,開機時鍵盤的顯示畫面為”H”與”Rev” LED 亮,游標指在 第三個七段顯示器。 設定為 U LED 時,參考 02-09。 若 02-04 設定為禁止正/反轉,Bit2 將以 02-04 之設定為準。 02-09 特殊顯示 設定範圍 00 01 02 03 a A U E P 出廠設定值 顯示驅動器輸出電流值 顯示驅動器 DC-Bus 電壓值 顯示驅動器輸出電壓均方根值 顯示回授信號物理量 此參數設定以鍵盤上面的 Mode 鍵切換顯示畫面至”U”特殊顯示時,鍵盤的顯示內容。 使用者可以用鍵盤上面的左鍵,切換特殊顯示的內容。 顯示的回授信號物理量會受 04-09∼04-20 設定值影響。 5-13 00 VFD-F 系列 02-10 使用者定義比例設定 a 出廠設定值 1.00 設定範圍 0.01∼160.00 此參數定義鍵盤 H LED 亮時,鍵盤顯示的數值比例。此時鍵盤顯使的數值 = 驅動器實際輸 出頻率×02-10。 假設驅動器輸出頻率為 90Hz,02-10 設為 2.5,則 H LED 亮時,鍵盤顯示數值為 225.00。 02-11 啟動時速度追蹤 a 出廠設定值 00 設定範圍 00 Disable 01 Enable (直流制動無效) 驅動器啟動時,電機可能因外力或本身慣性處於旋轉狀態,可能使驅動器的輸出電流過大, 造成電機損壞或無法啟動。使用啟動時速度追蹤可以使驅動器順利帶起旋轉中的電機。 使用啟動時速度追蹤時,啟動時直流制動功能 08-01 無效。 使用啟動時直流制動,可以將旋轉中的電機強制停止後,再由最低頻率加速至主頻率命令。 02-12 啟動時速度追蹤起始頻率 a 出廠設定值 00 a 出廠設定值 01 設定範圍 00 由主頻率命令開始追蹤 01 由最大設定頻率開始追蹤 01-00 02-13 主頻率記憶設定 設定範圍 00 無記憶 01 有記憶 此參數設定是否將主頻率命令紀錄至驅動器內部的 EEPROM。 若此參數設定為 00:無記憶,驅動器在斷電後(Lu),不會記錄主頻率命令。 若此參數設定為 01:有記憶,驅動器會在斷電後(Lu),紀錄主頻率命令。 不管此參數設定是否記憶,驅動器在發生故障 (01-01≠0)並復歸之後均會將主頻命令紀錄至 EEPROM。 主頻率命令記憶,僅紀錄頻率命令來源為鍵盤(02-00=0)或通信(02-00=4)。 5-14 VFD-F 系列 03 輸出功能參數 03-00 03-01 03-02 03-03 03-04 03-05 03-06 03-07 多功能輸出 1 (Relay 1) 多功能輸出 2 (Relay 2) 多功能輸出 3 (Relay 3) 多功能輸出 4 (Relay 4) 多功能輸出 5 (Relay 5) 多功能輸出 6 (Relay 6) 多功能輸出 7 (Relay 7) 多功能輸出 8 (Relay 8) 設定範圍 00-33 出廠設定值 00 功能一覽表 設定值 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 內容 無功能 Motor NO.1 Motor NO.2 Motor NO.3 Motor NO.4 Motor NO.5 Motor NO.6 Motor NO.7 Motor NO.8 輔助機 1 輸出 輔助機 2 輸出 輔助機 3 輸出 輔助機 4 輸出 輔助機 5 輸出 輔助機 6 輸出 輔助機 7 輸出 運轉中指示 設定到達頻率 18 19 零速(含停機) 過轉矩 20 外部中斷 21 低電壓檢出 說明 啟動循環控制時驅動器會依照 11-01~11-03 之設定值自動設定此 參數。 循環控制時,若只有一組電機可運轉時,循環控制將失效,即電 機不做切換。 驅動器運轉中(包含直流制動期間),對應的輸出繼電器會閉合。 當時驅動器輸出頻率到達主頻率命令時,對應的輸出繼電器會閉 合。 驅動器不輸出電壓信號時,對應的輸出繼電器會閉合。 驅動器的輸出電流超出 06-04 所設定之過轉矩檢出準位時,對應 的輸出繼電器會閉合。 驅動器的多功能輸入端子 04-00~04-07 設為外部中斷且動作時, 對應的輸出繼電器會閉合。 驅動器 DC Bus 的電壓過低,鍵盤顯示 Lu 時,對應的輸出繼電器 會閉合。 5-15 第 五 章 VFD-F 系列 設定值 內容 說明 22 交流電機驅動器操作 當 02-01 運轉指令來源設定設定為外部端子 01 或 02,或多功能 模式 輸入端子 04-00~04-07 設為 18 且動作時,對應的輸出繼電器會 閉合。 23 故障指示 當驅動器有任何故障發生時,對應的輸出繼電器會閉合。 24 任意頻率一到達 當驅動器輸出頻率超出 03-08 任意頻率一到達時對應的輸出繼電 器會閉合。 25 任意頻率二到達 當驅動器輸出頻率超出 03-09 任意頻率二到達時,對應的輸出繼 電器會閉合。 26 散熱片過熱警告 當驅動器的散熱器溫度超出預設值時,對應的輸出繼電器會閉合。 27 驅動器準備完成 當驅動器無任何故障或警告發生,可以接受運轉命令時,對應的 輸出繼電器會閉合。 28 緊急停止指示(EF1) 驅動器的多功能輸入端子 04-00~04-07 設為緊急停止且動作時, 對應的輸出繼電器會閉合。 29 軟體煞車輸出 驅動器的 DC Bus 電壓超出 08-19 軟體煞車準位時對應的輸出繼 電器會閉合。 30 OL 或 OL1 過載警告 驅動器發生 OL 或 OL1 故障時,對應的輸出繼電器會閉合。 31 休眠指示(SLEEP) 驅動器進入睡眠狀態 11-07 時,對應的輸出繼電器會閉合。 32 低電流指示 驅動器的輸出電流低於低電流設定 06-08 時,對應的輸出繼電器 會閉合。 33 PID 回授故障指示 驅動器的 PID 回授信號發生故障時,對應的輸出繼電器會閉合。 VFD-F 驅動器標準機型含有兩個 AB 接點繼電器(多功能輸出 1~2),外接繼電器卡含有六個 A 接點繼電器(多功能輸出 3~8),使用者可以依需要選購。 標準繼電器為 AB 接點繼電器,10A/250VAC,或 12A/24VDC。 外接繼電器為 A 接點繼電器,8A/250VAC,或 5A/30VDC。 繼電器動作時間約有 5~10 ms 的時間延遲。 繼電器閉合時約有 1ms 的彈跳,使用者必須有適當之對應手段,以免引起週邊設備之誤動 作。 03-08 任意頻率一到達設定 03-09 任意頻率二到達設定 設定範圍 0.00-120.00 Hz 出廠設定值 0.00 此參數設定任意到達頻率,當驅動器輸出頻率超出任意到達頻率時,對應的輸出繼電器會閉 合。 任意頻率到達的下緣有 2 Hz 的遲滯,若任意頻率到達設定為 20 Hz,則輸出頻率超過 20 Hz 時,對應的輸出繼電器閉合,當輸出頻率小於 18 Hz 時, 對應的輸出繼電器放開如下圖所 示。 5-16 VFD-F 系列 如下圖所示,設定頻率到達的動作原理為,當輸出頻率與主頻率命令的差距小於2Hz時,相 對應的繼電器閉合,當輸出頻率與主頻率命令的差距大於4 Hz時,相對應的繼電器放開。 頻率 2Hz 2Hz 2Hz 任意頻率一 4Hz 頻率命令 任意頻率二 時間 輸出頻率 任意頻率二到達 任意頻率一到達 設定頻率到達 03-10 模擬電壓輸出選擇 1,AFM1 0∼10V 03-11 模擬電流輸出選擇 2,AFM2 0/4∼20mA 設定範圍 00 01 02 03 04 05 出廠設定值 00 出廠設定值 01 輸出頻率 輸出電流 輸出電壓 頻率命令 負載功因 設定頻率 第 五 章 此參數設定模擬輸出信號AFM1與AFM2的內容。 設定為00:輸出頻率時,模擬輸出信號為驅動器之輸出頻率,以01-00最大頻率設定為滿刻度。 設定為01:輸出電流時,模擬輸出信號為驅動器之輸出電流,以驅動器額定電流的二倍為滿刻 度。 設定為02:輸出電壓時,模擬輸出信號為驅動器之輸出電壓,以01-02最大輸出電壓為滿刻度。 設定為03:頻率指令時,模擬輸出信號為驅動器之主頻率命令,以01-00最大頻率設定為滿刻度。 設定為04:負載功因時,模擬輸出信號為驅動器之輸出功率因素,以輸出功率因素1為滿刻度。 模擬輸出2,AFM2的最大負載阻抗不得高於500Ω。 03-12 模擬輸出增益 1 03-13 模擬輸出增益 2 a a 設定範圍 01~200 % 出廠設定值 此參數設定模擬輸出信號之增益。 5-17 100 VFD-F 系列 不適當的參數設定可能使模擬輸出信號超出驅動器的規格,此時模擬輸出信號將以滿刻度輸 出。 03-14 模擬輸出選擇 2,AFM2 定義 a 出廠設定值 01 出廠設定值 01 設定範圍 00 0∼20mA 01 4∼20mA 此參數定義模擬輸出 2,AFM2 的輸出範圍。 03-15 散熱風扇控制方式 設定範圍 00 01 02 03 交流電機驅動器開機立即運轉 執行運轉命令,風扇才運轉;停機後一分鐘,風扇停止 執行運轉命令,風扇才運轉;按停止鍵時,風扇停止 溫度到達約 60℃後啟動 5-18 VFD-F 系列 04 輸入功能參數 04-00 04-01 04-02 04-03 04-04 04-05 04-06 04-07 多功能輸入指令ㄧ 多功能輸入指令二 多功能輸入指令三 多功能輸入指令四 多功能輸入指令五 多功能輸入指令六 多功能輸入指令七 多功能輸入指令八 出廠設定值 01 出廠設定值 02 出廠設定值 03 出廠設定值 04 出廠設定值 05 出廠設定值 07 出廠設定值 08 出廠設定值 09 設定範圍 00~31 設定值 內容 00 無功能 01 01 03 04 05 06 多段速一 多段速二 多段速三 多段速四 Reset(NO) Reset(NC) 07 寸動運轉(JOG) 08 加減速禁止指令 09 10 加減速時間切換一 加減速時間切換二 11 12 13 14 B.B.(NO)輸入 B.B.(NC)輸入 Up Command Down Command 15 16 緊急停止 EF1(NO) 緊急停止 EF1(NC) 說明 z 外部端子沒有使用時建議全部設為 00:無功能,以避免不必 要的干擾問題。 z 使用者可以藉由此四個端子的數字狀態共可作 15 段速的設 定,選擇 15 種不同的段速操作參考 05-00~05-14。 z 驅動器發生故障後,可以使用此端子復歸驅動器。 z 驅動器發生故障時,此端子與鍵盤上之 Stop/Reset 鍵功能相 同。 z 此端子與鍵盤上之 JOG 功能相同。 z 驅動器於運轉狀態下,此端子無效。 z 此端子動作時,驅動器禁止作加減速動作,輸出頻率保持固 定。 z 使用者可以使用此二端子組合,選擇第一~四加減速時間 01-09~01-16。 z 不作加減速時間選擇時,驅動器自動以第一加減速時間作為 加減速時間。 z 此端子可以觸發驅動器的外部中斷(base block)。 z 外部中斷程序參考 08-08 z 此端子功能類似鍵盤上之上下鍵,可用以調整主頻率命令。 z 此端子只能於驅動器運轉時使用,驅動器停機時,此端子無 效。 z 此端子動作時,主頻率命令由實際輸出頻率開始往上下調 整,主頻率命令調整的速率與加減速時間相關。 z 此端子可觸發外部故障 EF1,其作用與外部端子 EF 相同。 5-19 第 五 章 VFD-F 系列 設定值 內容 17 AVI (open),ACI1 (close) 說明 z 此端子可選擇驅動器的主頻率命令來源為模擬輸入 AVI(端子 open)或 ACI1(端子 close)。 z 此端子設定時,主頻率命令來源 02-00 的設定自動失效。 z 此端子可選擇驅動器的運轉指令來源為模擬輸入鍵盤 (端子 open)或外部端子(端子 close)。 z 此端子設定時,主頻率命令來源 02-01 的設定自動失效。 此端子可將 PID 回授控制關閉,只以主頻率命令運轉。 18 KEYPAD(open), EXT(close) 19 20 21 22 23 24 25 26 27 28 29 30 31 PID 失效 輔助機 1 輸入 輔助機 2 輸入 輔助機 3 輸入 輔助機 4 輸入 輔助機 5 輸入 輔助機 6 輸入 輔助機 7 輸入 Motor NO.1 輸出失效 z 多組電機作循環控制時,此端子可將對應之電機設為失效, 循環控制將忽略此組電機。 Motor NO.2 輸出失效 Motor NO.3 輸出失效 z 運轉中的電機不接受電機輸出失效信號。 Motor NO.4 輸出失效 所有電機輸出失效 z 多組電機作循環控制時,此端子可將不是驅動器帶動之電機 設為失效,取消循環控制,只以運轉中之電機繼續運轉。 04-08 數字輸入的響應時間 出廠設定值 01 設定範圍 01∼20 此參數設定數字輸入端子 MI1~MI8,EF,REV,與 FWD 的響應時間。 機械開關動作時,會有無可避免的彈跳狀態發生,利用此參數設定可避免因開關彈跳或其他 不必要的干擾。 驅動器每2msec檢查一次數字輸入端子的狀態,以04-08設定為4為例,驅動器必須連續5 (4+1)次檢查到輸入端子的狀態與現在狀態不同,才會確認命令並更改狀態。因此命令輸入 到執行,約有8~10ms的時間延遲。 04-09 AVI Minimum scaling 04-10 AVI Maximum scaling 出廠設定值 出廠設定值 0.0 10.0 出廠設定值 出廠設定值 0.00 100.00 設定範圍 0.0 ~ 10.0V 04-11 AVI Minimum Scale Percentage 04-12 AVI Maximum Scale Percentage 設定範圍 0.00~100.00 % 5-20 VFD-F 系列 04-13 ACI1 Minimum scaling 04-14 ACI1 Maximum scaling 出廠設定值 出廠設定值 4.0 20.0 出廠設定值 出廠設定值 0.00 100.00 出廠設定值 出廠設定值 4.0 20.0 出廠設定值 出廠設定值 0.00 100.00 設定範圍 0.0 ~ 20.0 mA 04-15 ACI1 Minimum Scale Percentage 04-16 ACI1 Maximum Scale Percentage 設定範圍 0.00~100.00 % 04-17 ACI2 Minimum scaling 04-18 ACI2 Maximum scaling 設定範圍 0.0 ~ 20.0 mA 04-19 ACI12 Minimum Scale Percentage 04-20 ACI12 Maximum Scale Percentage 設定範圍 0.00~100.00 % 此參數設定模擬輸入值與最大設定頻率(01-00,開迴路控制時使用)或檢出參考值(10-01, PID 閉迴路控制時使用)之對應函數,如下圖所示。 01-00, 10-01 04-12 04-16 04-11 04-15 04-19 04-09 04-13 04-17 04-10 04-14 04-18 模擬輸入 假設要以 AVI(0~10V)作為目標值設定來源(02-00 = 01),去控制壓力感測器 ACI1(4~20mA 對應 0~5Pa)與 ACI2(0~10mA 對應 0~4Pa)的壓力和。希望藉由 AVI(0~10V)的調整,將目 標值設定在 3~7Pa 的範圍之內。首先將 10-01 設為 10,其他參數設定皆以此為參考值,如 下圖所示設定。再將 PID 回授控制相關參數設定即可。若將 AVI 調整為 7.5V,則可以將 ACI1 與 ACI2 的壓力和控制為 6Pa。 5-21 第 五 章 VFD-F 系列 壓力 Pa 10-01=10.0Pa 04-12=70 AVI 04-16=50 Ac2 04-20=40 Ac1 04-11=30 04-15=0 04-19=0 04-9=0V 04-13=4mA 04-17=0mA 04-18=10mA 模擬輸入 04-10=10V 04-14=20mA 04-21 AVI 模擬輸入延遲 04-22 ACI1 模擬輸入延遲 04-23 ACI2 模擬輸入延遲 設定範圍 0.00 ~ 10.00 s 出廠設定值 0.50 此參數可設定模擬輸入信號濾波之時間常數。適當的時間常數可將輸入信號的雜訊干擾濾 除。 太長的輸入延遲可能使系統的響應速率變慢,甚至造成系統震盪。 04-24 定義 External Reference 來源 設定範圍 00 01 02 03 04 05 06 出廠設定值 00 無功能 AVI+ACI1 ACI1+ACI2 ACI2+AVI 通信主頻率+AVI 通信主頻率+ACI1 通信主頻率+ACI2 此參數定義 External Reference 的來源。參考 02-00 與 10-00。 當頻率命令來源或 PID 回授信號來源需要用到兩個信號相加時,可以使用此參數來達成。 5-22 VFD-F 系列 05 多段速參數 05-00 05-01 05-02 05-03 05-04 05-05 05-06 05-07 05-08 05-09 05-10 05-11 05-12 05-13 05-14 第一段速頻率設定 第二段速頻率設定 第三段速頻率設定 第四段速頻率設定 第五段速頻率設定 第六段速頻率設定 第七段速頻率設定 第八段速頻率設定 第九段速頻率設定 第十段速頻率設定 第十一段速頻率設定 第十二段速頻率設定 第十三段速頻率設定 第十四段速頻率設定 第十五段速頻率設定 a a a a a a a a a a a a a a a 設定範圍 0.00-120.00 Hz 出廠設定值 5-23 0.00 第 五 章 VFD-F 系列 06 保護參數 06-00 失速防止電壓準位 出廠設定值 780.0 設定範圍 660.0V∼820.0VDC 00 Disable 此參數設定過電壓失速防止之電壓準位。 驅動器在做減速停止時,電動機可能處於發電狀態,電機及其負載的動能會轉換成電能並倒 灌至驅動器,使DC Bus的電壓升高。若電機及其負載的慣量較大或減速時間設定過小,可 能使DC Bus的電壓超出驅動器可允許的範圍,因而觸發過電壓保護功能,使驅動器停止輸 出。 為避免觸發驅動器的過電壓保護,可以加裝適當的煞車模組與煞車電阻,將電機回灌的電能 以熱形式消耗掉。或者可以將減速時間加長,亦可避免過電壓保護。 若上述方式有實行上的困難,可以調整適當的失速防止電壓準位。如下圖所示,當DC Bus 的電壓超出失速防止電壓準位時,驅動器停止減速,輸出頻率維持固定,待DC Bus電壓降 低之後再繼續作減速動作。 過電壓失速防止動作時,驅動器的減速時間將大於所設定的時間。 輸出頻率 過電壓失速防止 功能開啟時的減速特性 頻率保持 時間 設定的減速時間 06-01 加速中過電流失速防止 出廠設定值 120 設定範圍 20-150 % 00 Disable 參數設定加速中過電流失速防止之電流準位。 若電機的負載過大或驅動器的加速時間太短,加速時驅動器的輸出電流可能太大,致使電機 損壞或觸發驅動器的保護功能(OL,OC等)。使用此參數可避免這些狀況發生。 如下圖所示,若加速時驅動器的輸出電流超出過電流失速防止準位,驅動器會停止加速,輸 出頻率保持固定,待輸出電流降低之後再繼續加速動作。 5-24 VFD-F 系列 過電流失速防止動作時,驅動器的加減速時間將大於所設定的時間。 加速中過電流 失速防止準位 電流 06-01 輸出頻率 加速中過電流失速 防止輸出頻率持平 時間 加速中過 電流失速防 止功能 06-02 運轉中過電流失速防止 出廠設定值 120 設定範圍 20-150 % 00 Disable 此參數設定運轉中過電流失速防止之電流準位。 電機運轉中負載突然變大,會造成輸出電流增加,可能觸發驅動器的保護功能(OL,OC等)。 使用此參數可避免這些狀況發生。 如下圖所示,電機運轉中負載突然加大,使輸出電流超出過電流失速防止準位,驅動器會降 低輸出頻率,待輸出電流降低之後再將輸出頻率加速至頻率命令。 06-02 定速中過電流 失速防止準位 電流 定速中過電流失速 防止輸出頻率遞減 輸出頻率 時間 定速 中過電流 失速防止 功能 06-03 過轉矩檢出功能選擇 設定範圍 00 01 02 03 04 出廠設定值 不檢測 定速運轉中過轉矩偵測,(oL2)繼續運轉。 定速運轉中過轉矩偵測,(oL2)停止運轉。 運轉中過轉矩偵測,(oL2)繼續運轉。 運轉中過轉矩偵測,(oL2)停止運轉。 5-25 00 第 五 章 VFD-F 系列 此參數設定過轉矩檢出的處理程序。 此參數設定為定速運轉中過轉矩偵測時01或02,加速期間不偵測過轉矩。 06-04 過轉矩檢出準位 出廠設定值 110 出廠設定值 0.1 設定範圍 30-150 % 此參數設定過轉矩檢出之電流準位。 06-05 過轉矩檢出時間 設定範圍 0.1-60.0 s 此參數設定過轉矩檢出之時間。 電機作 V/F 控制時,其輸出轉矩大致與驅動器的輸出電流成正比,因此可以用驅動器的輸出 電流來限制電機的輸出轉矩。 若驅動器的輸出電流超過06-04過轉矩檢出準位,持續時間超過06-05檢出時間,會觸發OL2 保護功能。 06-06 電子熱動電驛選擇 出廠設定值 02 設定範圍 00 不動作 01 標準電機 02 特殊電機 此參數設定電子熱動電驛的動作模式。 當電機的額定電流較驅動器額定電流小或電機散熱設計不良時,可使用此參數限制驅動器輸 出電流,以避免電機因過熱而損壞。 設定為01電子熱動電驛適合標準電機(無散熱風扇或散熱風扇固定於轉子轉軸)使用。低轉速 時,電機的散熱能力較差,因此電子熱動電驛的動作時間會適當的減少,以確保電機壽命。 設定為02電子熱動電驛適合特殊電機(電機散熱風扇使用獨立電源)使用。電機的散熱能力與 轉速無明顯相關,因此低轉速電子熱動電驛仍保持固定,可確保電機在低轉速時的負載能力。 06-07 電子熱動電驛動作時間 出廠設定值 60 設定範圍 30-600 s 此參數設定電子熱動電驛的動作時間。 電子熱動電驛以電機的滿載電流07-02為基準,當輸出電流大於電機滿載電流時,驅動器開 始累加時間,若累加時間超出06-07之設定時間,電子熱動電驛動作(OL1)。 電子熱動電驛作用時間設定是以輸出電流為電機額定電流的120%為基準,其實際動作時間 會依輸出電流作適當調整,電流大時作用時間短,電流小時作用時間長,如下圖所示。 5-26 VFD-F 系列 5 操作時間(分鐘) 60Hz or more 4 50Hz 3 10Hz 5Hz 2 負 載 率 (%) 1 0 20 40 60 80 100 120 140 160 180 200 06-08 低電流檢出位準 出廠設定值 00 出廠設定值 10.0 出廠設定值 01 顯示內容 00∼100 % (00 不作用) 06-09 低電流檢出時間 顯示內容 0.0~ 3600.0 s 06-10 低電流檢出處理 顯示內容 00 警告並減速停車 01 警告並自由停車 02 警告並繼續運轉 此參數設定低電流檢出的動作模式。 當電機不適合或不需要運轉在低電流(通常表示負載太小或空載)狀況下時,可使用此功能作 適當處理。以確保系統安全。 06-11 06-12 06-13 06-14 最近第一次異常記錄 最近第二次異常記錄 最近第三次異常記錄 最近第四次異常記錄 顯示內容 00-22 代碼 00 01 02 03 04 05 06 故障內容 00:無異常記錄 oc(過電流) ov(過電壓) oH(過熱) oL(驅動器過載) oL1(電子熱動電驛) EF(外部異常) 出廠設定值 可能原因 建議處理方式 5-27 00 第 五 章 VFD-F 系列 代碼 故障內容 07 occ(驅動模組異常) 08 09 CF3(硬體線路異常) HPF(保護線路異常) 10 ocA(加速中過電流) 11 ocd(減速中過電流) 12 ocn(恆速中過電流) 13 14 15 16 17 18 GFF(接地故障) 保留 CF1(寫入異常) CF2(讀出異常) 保留 oL2(電機過載) 19 20 21 保留 codE(軟體或密碼保 護) EF1(外部緊急停止) 22 PHL(欠相) 23 24 Lc(低電流) FbL(回授信號錯誤) 可能原因 建議處理方式 驅動器功率開關保護線路動作 檢查電機額定是否與驅動器匹配。 檢查加減速時間設定是否適當。 檢查電機與配線是否有短路發生。 驅動器開機時 A/D 有異常信號 檢查輸入電壓是否在規格內。 驅動器開機時保護中斷動作 檢查輸入電壓是否在規格內。 檢查配線是否正確。 加速時輸出電流過大 檢查電機額定是否與驅動器匹配。 檢查電機負載是否過大。 檢查加速時間設定是否適當。 檢查電機與配線是否有短路發生。 減速時輸出電流過大 檢查減速時間設定是否適當。 檢查電機與配線是否有短路發生。 恆速運轉時輸出電流過大 檢查電機負載是否過大。 檢查電機與配線是否有短路發生。 EEPROM 資料寫入異常 EEPROM 資料讀出異常 斷電再開機。 斷電再開機。 電機負載是否過大 檢查電機負載是否過大。 檢查 06-04,06-05 設定值。 EF1 設定且動作。 檢查外部中斷的驅動線路。 檢查 04-08 設定。 輸入電源欠相。 檢查輸入電源是否有欠相或三相 輸入電源三相不平衡超出規格 不平衡發生。 低電流設定且動作 檢查 06-08,06-09 設定值。 回授信號大於設定誤差 檢查 10-08,10-09 設定值。 06-15 參數重置設定 出廠設定值 00 出廠設定值 00 設定範圍 00~65535 10 參數重置,其餘無作用。 此參數可將所有參數設定值重置為出廠設定值。 06-16 參數保護密碼輸入 設定範圍 00~65535 5-28 VFD-F 系列 此參數作為06-17密碼設定之後解密之用,使用者需輸入與06-17相同的密碼,方可解除密 碼設定,修改驅動器之參數。 此參數解密的有效時間範圍,只在此次開機時間。關機之後再上電,驅動器會再次鎖碼。因 此要將密碼完全清除,必須於06-16輸入正確密碼之後,將06-17設為00,清除密碼保護。 驅動器允許三次錯誤的密碼輸入,連續三次輸入錯誤密碼之後,驅動器將顯示CODE錯誤並 鎖死。使用者必須斷電再上電。 06-16的顯示值為已輸入錯誤密碼之次數。 06-17 參數保護密碼設定 出廠設定值 00 設定範圍 00~65535 00 無密碼保護 此參數可設定參數保護密碼。密碼設定之後,06-17會顯示1,除非06-16輸入正確的密碼, 所有參數將不允許修改。 使用者必須牢記所輸入的密碼,若無法輸入正確之密碼,請由經銷路徑,送回台達電子解 第 五 章 碼。07 電機參數 07-00 驅動器機種識別 出廠設定值 ## 設定範圍 依機種顯示 此參數顯示驅動器之機種代碼。驅動器之額定輸出電流,額定輸入電壓,與最高載波頻率皆 與機種設定有關。使用者可參考下表,檢查驅動器之機種是否正確。 功率 kW 5.5 7.5 11 15 18.5 22 30 37 45 55 馬力 HP 7.5 10 15 20 25 30 40 50 60 75 100 120 150 175 機種代碼 13 15 17 19 21 23 25 27 29 31 額定電流 13 18 24 32 38 45 60 73 91 110 150 180 220 260 75 33 最高載波頻率 10kHz 9kHz 6kHz 最低載波頻率 4kHz 3kHz 2kHz 出廠設定值 9kH z 6kHz 4kHz 90 35 110 130 37 39 此參數只做顯示之用,不開放給使用者設定。 07-01 驅動器額定電流 出廠設定值 ## 設定範圍 依機種顯示 此參數顯示驅動器之額定輸出電流,使用者可以檢視此參數顯示值,檢查機種是否正確。 此參數只做顯示之用,不開放給使用者設定。 5-29 删除的内容: 分分分 VFD-F 系列 07-02 電機滿載電流 a 出廠設定值 100% 設定範圍 30∼120 % 此參數可設定負載電機之滿載電流。使用者必須依實際負載電機銘牌顯示之滿載電流輸入。 輸入之數值為電機滿載電流與驅動器額定電流之比值,若驅動器額定電流為 150A,電機滿 載電流為 120A,則 07-02 應設為 80。 此參數與轉差補償功能 07-04~07-05,電子熱動電驛功能 06-06~06-07 有關。不正確的參數 設定可能使上述功能失效,甚至造成電機與驅動器之損壞。 負載電機之滿載電流不可大於驅動器額定電流,且應大於驅動器額定電流的一半。 07-03 電機無載電流 a 出廠設定值 30% 設定範圍 1-99 % 此參數可設定負載電機之無載電流。使用者必須依實際負載電機名牌顯示之無載電流輸入。 輸入之數值為電機無載電流與驅動器額定電流之比值,若驅動器額定電流為 150A,電機無 載電流為 40A,則 07-02 應設為 27。 此參數與轉差補償功能 07-04~07-05 有關。為得到最佳的轉差補償效果,此參數必須正確 輸入。不正確的參數設定可能使上述功能失效,甚至造成電機與驅動器之損壞。 若電機的無載電流無法由銘牌讀出,可將電機卸載之後,以驅動器實際驅動,由鍵盤讀出無 載電流。 07-04 自動轉差補償增益 a 出廠設定值 0.0 設定範圍 0.0∼3.0 此參數設定驅動器轉差補償之增益。 由於感應電機的特性,電機轉子的速度無法達到同步轉速(驅動器的輸出頻率),同步轉速與 轉子轉速的差稱為轉差(slip frequency)。轉差大致與輸出轉矩與輸出電流成正比,因此可以 根據輸出電流的大小(Io)作轉差補償,使轉子轉速與主頻率命令相同。 轉差補償的公式為(07-05) *(07-04)*[Io-(07-03)]/[(07-02)-(07-03)]。若驅動器的額定電流為 150A,電機的滿載電流為 120A,無載電流為 40A,額定轉差為 5Hz,驅動器的輸出電流為 100A,此時轉差補償量為 5* (07-04)* (100-40)/(120-40) = 3.75*(07-04)。 若 07-04 設為 1.0 則補償量 3.75,若主頻率命令設為 50Hz,則輸出頻率為 53.75。 補償後的輸出頻率仍受 01-07 上限頻率限制,使用轉差補償時,01-07 應設定適當值。 作 PID 回授控制時,轉差補償功能失效。 不適當的設定值可能使補償過量。 5-30 VFD-F 系列 07-05 電機額定轉差 a 出廠設定值 0.00 設定範圍 0.00∼20.00 Hz 此參數可設定負載電機之額定轉差。使用者必須依實際負載電機銘牌顯示之額定轉速輸入。 若電機的額定電源頻率為 60 Hz,電機極數為 4 極電機,電機額定轉速為 1650rpm。則電機 額定轉差為。60 Hz-(1650rpm*4/120) = 5 Hz。 此參數與轉差補償功能 07-04 有關。為得到最佳的轉差補償效果,此參數必須正確輸入。不 正確的參數設定可能使上述功能失效,甚至造成電機與驅動器之損壞。 07-06 自動轉矩補償增益 a 出廠設定值 00 設定範圍 00∼10 此參數設定驅動器自動轉矩補償之增益。 由於感應電機的特性,電機的負載較大時,驅動器的輸出電壓有一部份為定子繞組的阻抗所 吸收,致使電機的激磁電感端電壓不足,因而使氣隙磁場不足,造成輸出電流太大但是輸出 轉矩不足的狀況發生。自動轉差補償增益可以根據負載狀況,自動調整輸出電壓大小,使電 機之氣隙磁場維持在額定,以得到最佳運轉狀況。 補償增益設太大可能造成電機過激磁,使驅動器輸出電流過大,電機過熱或觸發驅動器的保 護功能動作。 07-07 手動轉矩補償增益 a 出廠設定值 0.0 設定範圍 0.0∼10.0 此參數設定驅動器手動轉矩補償之增益。 手動轉矩補償不再參考負載狀況,直接在所設定的 V/F 曲線上加上補償電壓。基本上只是將 V/F 曲線改變,其功能可以由調整 V/F 曲線來達成。 07-08 累計電機運轉時間(Min) 出廠設定值 00 出廠設定值 00 設定範圍 00 to 1439 Min 07-09 累計電機運轉時間(Day) 設定範圍 00 to 65535 Day 此參數可顯示電機運轉時間。 5-31 第 五 章 VFD-F 系列 08 特殊參數 08-00 直流制動電流準位 出廠設定值 00 出廠設定值 0.0 設定範圍 00-100 % 此參數可設定直流制動時輸出電流的準位。 08-01 啟動時直流制動時間 設定範圍 0.0-60.0 s 此參數可設定啟動時直流制動之時間。 電機在運轉可能因為外力或本身慣量而處於旋轉狀態,驅動器冒然投入可能使輸出電流過 大,造成電機損壞或出現驅動器的保護功能。此參數可在電機運轉前,輸出一直流電流產生 轉矩迫使電機停止,以得到平穩的啟動特性。 08-02 停止時直流制動時間 出廠設定值 0.0 設定範圍 0.0-60.0 s 參數可設定停止時直流制動之時間。 電機在運轉可能因為外力或本身慣量,在驅動器停止輸出之後仍處於旋轉狀態,無法進入準 確的停車狀態。此參數可在驅動器停止輸出後,輸出一直流電流產生轉矩迫使電機停止,以 確保電機已準確停車。 08-03 直流制動起始頻率 出廠設定值 0.00 設定範圍 0.00-120.00 Hz 此參數可設定停止時直流制動之起始頻率。 此參數若設定高於01-05最低頻率設定,驅動器煞車時,不會減速至01-05而提早進入直流制 動狀態。適當的直流制動起始頻率設定,可以得到較佳的煞車特性。 輸出頻率 停止時直流 制動時間 起動直流 制動時間 最低起動頻率 01-05 08-03 停止時直流 制動起始頻率 運轉/停止 O FF ON 直流制動輸 出時序圖 5-32 時間 VFD-F 系列 08-04 瞬時停電再啟動 出廠設定值 00 設定範圍 00 無效 01 由上往下追蹤 02 由下往上追蹤 此參數可設定瞬時停電再啟動之動作模式。 驅動器連接之電源系統,可能因為各種原因而瞬間停電,此功能可允許驅動器在電源系統恢 復之後,繼續輸出電壓,不致因此而導致停機。 此參數設定為 01:驅動器由斷電前之頻率往下追蹤,待驅動器的輸出頻率與電機轉子速度 同步之後,再加速至主頻率命令。若電機的負載具有慣性大,各種阻力較小之特性,建議使 用此設定。 此參數設定為 02:驅動器由最低頻率往上開始追蹤,待驅動器的輸出頻率與電機轉子速度 同步之後,再加速至主頻率命令。若電機的負載具有慣性小,各種阻力較大之特性,建議使 用此設定。 08-05 允許停電時間 出廠設定值 2.0 設定範圍 0.1∼5.0 s 參數設定允許停電時間,若電力系統在允許停電時間內恢復正常供電,驅動器會執行08-04 之瞬間停電再啟動功能。 允許停電時間是從驅動器顯示Lu之後開始計算,因此實際允許停電時間會因負載大小而有所 變動。 允許停電時間必須在驅動器之輔助電源仍然正常工作為前提,若輔助電源在所允許停電時間 內關機,則實際允許停電時間會較參數設定值為短。 08-06 速度追蹤時間 出廠設定值 0.5 設定範圍 0.1∼5.0 s 此參數設定異常狀態(斷電、OV、OC或BB)恢復後,到開始執行速度追蹤功能之延遲時 間。 08-07 速度追蹤最大電流 出廠設定值 110 設定範圍 30-150 % 此參數設定速度追蹤之最大電流。 速度追蹤最大電流會影響到同步到達時間,參數設定值愈大,愈快到達同步。參數設定值太 大可能造成過負載保護功能動作。 5-33 第 五 章 VFD-F 系列 08-04設為01:由上往下追蹤時,輸出頻率由主頻率命令開始往下追蹤,此時輸出電壓與輸 出電流由零開始增加。當輸出電流等於08-07設定值時,驅動器輸出電流保持定值,而輸出 頻率繼續往下追蹤。當輸出頻率與輸出電壓與V/F設定頻率重合時,驅動器判定同步到達, 再沿V/F曲線加速至主頻率命令。 08-04設為02:由下往上追蹤時,驅動器依V/F曲線設定加速,不作特殊處理。 允許停電 最長時間 允許停電 最長時間 08-05 輸入電源 輸出頻率 08-05 同步速度檢出 驅動器由斷電前速度 往下追蹤 08-04=01 B.B.時間 08-06 速度尋找 驅動器由起動頻率往上追蹤 08-04=02 B.B.時間 08-06 輸出電壓 瞬 時停電再 起動時序 圖 主頻率命令 輸出頻率 輸出電壓 輸出電壓 08-07 實際V/F輸出 輸出電流 V/F曲線設定 同步到達 輸出頻率 時間 出廠設定值 08-08 B.B.速度追蹤方式 00 設定範圍 00 由上往下追蹤 01 由下往上追蹤 此參數設定多功能輸入端子04-00~04-07設為BB外部中斷(11或12)且動作時,驅動器速度追 蹤的方式。 BB速度追蹤方式與瞬時停電再啟動之速度追蹤動作相同。 08-09 異常再啟動次數 出廠設定值 設定範圍 00∼10 此參數設定允許異常再啟動次數。 5-34 00 VFD-F 系列 當驅動器發生異常(只限OV, OC, OCC三種) ,而異常自動消失時,此參數允許驅動器自動 復歸並以異常前之參數設定運轉。 若發生異常之次數超出08-09設定,驅動器拒絕再啟動,需使用者介入復歸才可以繼續運轉。 08-10 異常再啟動次數自動復歸時間 出廠設定值 600 設定範圍 00 to 60000 s 此參數設定異常再啟動次數自動復歸時間,若發生異常且再啟動成功之後,於08-10設定時 間之內沒有任何異常發生,則驅動器會將異常次數紀錄復歸為零。 08-11 08-12 08-13 08-14 08-15 08-16 禁止操作頻率一 Up 禁止操作頻率一 Down 禁止操作頻率二 Up 禁止操作頻率二 Down 禁止操作頻率三 Up 禁止操作頻率三 Down 設定範圍 0.00-120.00 Hz 出廠設定值 0.00 此參數設定驅動器禁止運轉之頻率範圍。此功能可以使驅動器不會持續運轉在電機或負載系 統的共振頻率或其他原因禁止運轉之頻率。 此參數設定必須符合 08-11≧08-12≧08-13≧08-14≧ 08-15≧08-16 之限制。 主頻率命令仍可設定於禁止運轉頻率範圍之內,此時輸出頻率將限制為禁止運轉頻率範圍之 下限。 驅動器在作加減速時,輸出頻率仍會經過禁止運轉頻率範圍。 08-17 自動省電運轉 出廠設定值 設定範圍 00 無效 01 有效 此參數可設定自動省電運轉功能。 5-35 00 第 五 章 VFD-F 系列 輸出電壓 100% 最大可降低30% 正常的輸出電壓 70% 頻率 08-18 自動穩壓功能(AVR) 出廠設定值 00 設定範圍 00 開啟 AVR 01 取消 AVR 02 停車減速時取消 AVR 此參數可設定自動穩壓 Automatic Voltage Regulation 是否動作。 此參數設為 01:取消 AVR 時,驅動器以 DC Bus 為定值(620VDC)計算輸出電壓,輸出電壓 值將因 DC Bus 電壓飄動而飄動,可能造成輸出電流不足、太大或震盪。 此參數設為 00:開啟 AVR 時,驅動器以實際 DC Bus 電壓值計算輸出電壓,輸出電壓將不 因 DC Bus 電壓飄動而飄動。 此參數設為 02:時,驅動器只在停車減速時取消 AVR,可以在某種程度內加速煞車。 08-19 軟體煞車位準設定 a 出廠設定值 760.0 設定範圍 740V~820VDC 00 Disable 此參數可設定軟體煞車位準設定。 VFD055~150F43A機種內含煞車晶體,使用者可以選用適當煞車電阻,以達到最佳減速特 性。 煞車晶體的動作準位可以由此參數設定。 5-36 VFD-F 系列 09 通訊參數 09-00 通訊位址 a 出廠設定值 01 a 出廠設定值 01 設定範圍 01-254 00 Disable 此參數設定驅動器串列通訊時之位址。 09-01 通訊傳送速度 Baud Rate 設定範圍 00 01 02 03 Baud rate 4800(傳輸速度,位元∕秒) Baud rate 9600(傳輸速度,位元∕秒) Baud rate 19200(傳輸速度,位元∕秒) Bard rate 38400(傳輸速度,位元∕秒) 利用使電腦經由其內部 RS-485 串列埠,可設定及修改驅動器內參數及控制驅動器運轉,並 可監測驅動器的運轉狀態。此參數用來設定電腦與驅動器彼此的傳輸速率。 09-02 傳輸錯誤處理 設定範圍 00 01 02 03 a 出廠設定值 03 警告並繼續運轉 警告並減速停車 警告並自由停車 不警告並繼續運轉 第 五 章 此參數設定驅動器使用串列通訊時,傳送錯誤的處理方式。 09-03 傳輸超時(Over time)檢出 設定範圍 a 出廠設定值 00 00 無傳輸超時檢出 01 傳輸超時檢出 此參數適用於 ASCII 模式,當設定為 01 時,表示有超時檢出字符與字符間距不得大於 500 ms。命令字串與字串間,無此規定。 09-04 通訊資料格式 a 出廠設定值 00 a 出廠設定值 00 設定範圍 00 7-bit for ASCII 01 8-bit for ASCII 02 8-bit for RTU 09-05 奇偶位元及停止位元設定 設定範圍 00 01 02 03 04 05 None parity + 2 stop bit Even parity + 2 stop bit Odd parity + 2 stop bit None parity + 1 stop bit Even parity + 1 stop bit Odd parity + 1 stop bit 5-37 VFD-F 系列 設定串列通訊之通訊資料格式。 09-06 通訊運轉命令一 設定範圍 a 出廠設定值 00 a 出廠設定值 60.00 00B 無功能 01B 停止 10B 啟動 11B JOG 啟動 Bit2~3 保留 Bit4~5 00B 無功能 01B 正方向指令 10B 反方向指令 11B 改變方向指令 Bit6~7 00B 第一段加減速 01B 第二段加減速 10B 第三段加減速 11B 第四段加減速 Bit8~11 0000B 主速 0001B 第一段加減速 0010B 第二段加減速 0011B 第三段加減速 0100B 第四段加減速 0101B 第五段加減速 0110B 第六段加減速 0111B 第七段加減速 1000B 第八段加減速 1001B 第九段加減速 1010B 第十段加減速 1011B 第十一段加減速 1100B 第十二段加減速 1101B 第十三段加減速 1110B 第十四段加減速 1111B 第十五段加減速 Bit12 選擇 Bit6~11 功能 Bit13~15 保留 Bit0~1 此參數只能由通訊設定,鍵盤設定無效。 09-07 通訊頻率設定 設定範圍 0~120.00 Hz 此參數只能由通訊設定,鍵盤設定無效。 5-38 VFD-F 系列 09-08 通訊運轉命令二 設定範圍 a Bit0~1 0B 1B Bit1 1B Bit2 0B 1B Bit3~15 保留 出廠設定值 00 EF OFF EF ON Reset BB OFF BB ON 此參數只能由通訊設定,鍵盤設定無效。 利用此參數設定 BB 動作,亦必須利用此參數解除 BB。 驅動器具內建 RS-485 串聯通訊介面,通訊埠(RJ-11)位於控制迴路端子,端子定義如下:使 用 RS-485 串聯通訊介面時,每一台驅動器必須預先在(9-00)指定其通訊位址,電腦便根據其 個別的位址實施控制。 驅動器設定為以 Modbus networks 通訊,其可使用下列二種模式:ASCII (American Standard Code for Information interchange) 模式或 RTU (Remote Terminal Unit) 模式。使用者可於參數 (09-04,09-05) 中設定所需之模式及通訊協定。 第 五 章 編碼意義: ASCII 模式: 每個 8-bit 資料由兩個 ASCII 字符所組成。例如:一個 1-byte 資料 64H(十六進位表示法),以 ASCII “64” 表示,包含了’6’ (36H) 及 ‘4’(34H)。 字符 ‘0’ ‘1’ ‘2’ ‘3’ ‘4’ ‘5’ ‘6’ ‘7’ ASCII code 30H 31H 32H 33H 34H 35H 36H 37H 字符 ‘8’ ‘9’ ‘A’ ‘B’ ‘C’ ‘D’ ‘E’ ‘F’ ASCII code 38H 39H 41H 42H 43H 44H 45H 46H RTU 模式: 每個 8-bit 資料由兩個 4-bit 之十六進位字符所組成。例如:64H。 10-bit 字符框(用於 7-bit 字符) : (7 , N , 2 :參數 9-04=0) Start bit 0 1 2 3 4 5 6 Stop Stop bit bit 7-Data bits字 元 串 10-bits字 元 框 (Character frame) 5-39 VFD-F 系列 (7 , E , 1 :參數 9-04=1) Start bit 0 1 2 3 4 5 6 Even Stop parity bit 7-Data bits字 元 串 10-bits字 元 框 (Character frame) (7 , O , 1 :參數 9-04=2) Start bit 0 1 2 3 4 5 6 Odd Stop parity bit 7-Data bits字 元 串 10-bits字 元 框 (Character frame) 11-bit 字符框(用於 8-bit 字符) : (8 , N , 2 :參數 9-04=3 或 6) Start bit 0 1 2 3 4 5 6 7 Stop Stop bit bit 8-Data bits字 元 串 11-bits字 元 框 (Character frame) (8 , E , 1 :參數 9-04=4 或 7) Start bit 0 1 2 3 4 5 6 7 Even Stop parity bit 8-Data bits字 元 串 11-bits字 元 框 (Character frame) (8 , O , 1 :參數 9-04=5 或 8) Start bit 0 1 2 3 4 5 6 7 8-Data bits字 元 串 11-bits字 元 框 (Character frame) 5-40 Odd Stop parity bit VFD-F 系列 通信資料結構: 資料格式框 ASCII 模式: DATA 0 啟始字符 ‘:’ (3AH) 通訊位址: 8-bit 位址包含了 2 個 ASCII 碼 命令碼: 8-bit 命令包含了 2 個 ASCII 碼 資料內容: n×8-bit 資料包含了 2n 個 ASCII 碼 n<=25,最多 50 個 ASCII 碼 LRC CHK 1 LRC CHK 0 END 1 END 0 偵誤值: 8-bit 偵誤值包含了 2 個 ASCII 碼 結束字符: END1= CR (0DH), END0= LF(0AH) STX ADR 1 ADR 0 CMD 1 CMD 0 DATA (n-1) ……. RTU 模式: START ADR CMD 超過 10 ms 之靜止時段 通訊位址: 8-bit 位址 命令碼: 8-bit 命令 DATA (n-1) 資料內容: ……. n×8-bit 資料, n<=25 DATA 0 CRC CHK Low CRC 偵誤值: CRC CHK High 16-bit 偵誤值由 2 個 8-bit 字符組成 END 超過 10 ms 之靜止時段 ADR(通訊位址) 合法的通訊位址範圍在 0 到 254 之間。通訊位址為 0 表示對所有同一網路內之設備進行廣播, 在此情況下,驅動器將不會回應任何訊息給主裝置。 例如:對通訊位址為 16(十進位)之交流電機驅動器進行通訊: ASCII 模式 :(ADR 1, ADR 0) = ’1’,’0’ => ‘1’=31H, ‘0’=30H RTU 模式 :(ADR) = 10H CMD(命令指令)及 DATA(資料字符) 5-41 第 五 章 VFD-F 系列 資料字符之格式依命令碼而定。可用之命令碼敘述如下: z 命令碼:03H,連續讀取數筆參數資料 N 最大為 10。例如:從位址 01H 之驅動器,讀取 01-01,01-02 2 組參數內容。 ASCII 模式: 命令訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 資料 起始位址 資料量 (Word) LRC CHK 1 LRC CHK 0 END 1 END 0 回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 資料位址 ‘:’ ‘0’ ‘1’ ‘0’ ‘3’ ‘0’ ‘1’ ‘0’ ‘1’ ‘0’ ‘0’ ‘0’ ‘2’ ‘D’ ‘7’ CR LF 資料量 (Word) LRC CHK 1 LRC CHK 0 LRC CHK 1 LRC CHK 0 END 1 END 0 ‘:’ ‘0’ ‘1’ ‘0’ ‘3’ ‘0’ ‘4’ ‘1’ ‘7’ ‘7’ ‘0’ ‘0’ ‘8’ ‘9’ ‘8’ ‘D’ ‘1’ CR LF 錯誤回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 錯誤碼 LRC CHK 0 LRC CHK 1 END 1 END 0 ‘:’ ‘0’ ‘1’ ‘8’ ‘3’ ‘0’ ‘2’ ‘6’ ‘D’ CR LF RTU 模式: 命令訊息: ADR CMD 資料 起始位址 資料量 (Word) CRC CHK Low CRC CHK High z 01H 03H 01H 01H 00H’ 02H 94H 37H 回應訊息: ADR CMD 資料 0101H 內容 0102H 內容 01H 03H 04H 17H 70H 08H 98H 錯誤回應訊息: ADR CMD 錯誤碼 LRC CHK 1 END 1 CRC CHK LOW CRC CHK HIGH 命令碼:06H,寫入單筆資料 例如,將 6000(1770H)寫到位址為 01H 交流電機驅動器的 0100H 位址。 5-42 01H 90H ‘0’ ‘2’ ‘D’ CR VFD-F 系列 ASCII 模式: 命令訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 資料 起始位址 資料量 (Word) LRC CHK 1 LRC CHK 0 END 1 END 0 回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 資料 起始位址 ‘:’ ‘0’ ‘1’ ‘0’ ‘6’ ‘0’ ‘1’ ‘0’ ‘0’ ‘1’ ‘7’ ‘7’ ‘0’ ‘7’ ‘7’ CR LF LRC CHK 1 LRC CHK 0 END 1 END 0 01H 06H 01H 00H 17H’ 00H 86H 22H 回應訊息: ADR CMD 1 資料 起始位址 資料量 (Word) CRC CHK LOW CRC CHK 錯誤回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 錯誤碼 ‘:’ ‘0’ ‘1’ ‘0’ ‘6’ ‘0’ ‘1’ ‘0’ ‘0’ ‘1’ ‘7’ ‘7’ ‘0’ ‘7’ ‘7’ CR LF 資料量 (Word) LRC CHK 0 LRC CHK 1 END 1 END 0 ‘:’ ‘0’ ‘1’ ‘8’ ‘6’ ‘0’ ‘2’ ‘6’ ‘D’ CR LF 第 五 章 RTU 模式: 命令訊息: ADR CMD 資料 起始位址 資料 CRC CHK LOW CRC CHK HIGH z 01H 06H 01H 00H 17H 70H 86H 22H 錯誤回應訊息: ADR CMD 1 錯誤碼 LRC CHK 1 END 1 01H 86H 02 ‘D’ CR 命令碼:08H,通訊迴路測試 此命令用來測試主控設備(通常為 PC 或 PLC)與驅動器間通訊是否正常,驅動器將收到之資料內 容原封不動的回送給主控設備。 ASCII 模式: 命令訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 ‘:’ ‘0’ ‘1’ ‘0’ ‘8’ 回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 ‘:’ ‘0’ ‘1’ ‘0’ ‘8’ 5-43 錯誤回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 ‘:’ ‘0’ ‘1’ ‘8’ ‘8’ VFD-F 系列 資料 起始位址 資料量 (Word) LRC CHK 1 LRC CHK 0 END 1 END 0 ‘0’ ‘0’ ‘0’ ‘0’ ‘1’ ‘7’ ‘7’ ‘0’ ‘7’ ‘0’ CR LF 資料 起始位址 ‘0’ ‘0’ ‘0’ ‘0’ ‘1’ ‘7’ ‘7’ ‘0’ ‘7’ ‘0’ CR LF 資料量 (Word) LRC CHK 1 LRC CHK 0 END 1 END 0 錯誤碼 ‘0’ ‘2’ ‘6’ LRC CHK 0 LRC CHK 1 END 1 END 0 ‘D’ CR LF RTU 模式: 命令訊息: ADR CMD 資料 起始位址 資料 CRC CHK LOW CRC CHK HIGH z 01H 08H 00H 00H 17H’ 70H 8EH 0EH 回應訊息: ADR CMD 1 資料 起始位址 資料 01H 08H 00H 00H 17H 70H 8EH 0EH CRC CHK LOW CRC CHK 錯誤回應訊息: ADR CMD 1 錯誤碼 01H 88H 02 CRC CHK LOW CRC CHK HIGH 命令碼:10H,連續寫入數筆資料 例如,變更驅動器(位址 01H)的多段速設定 05-00=50.00(1388H),05-01=40.00(0FA0H) ASCII 模式: 命令訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 資料 起始位址 資料量 (Word) ‘:’ ‘0’ ‘1’ ‘1’ ‘0’ ‘0’ ‘5’ ‘0’ ‘0’ ‘0’ ‘0’ ‘0’ ‘2’ 回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 資料位址 ‘:’ ‘0’ ‘1’ ‘1’ ‘0’ ‘0’ ‘5’ ‘0’ ‘0’ ‘0’ ‘0’ ‘0’ ‘2’ 資料量 (Word) 5-44 錯誤回應訊息: STX ADR 1 ADR 0 CMD 1 CMD 0 錯誤碼 LRC CHK 0 LRC CHK 1 END 1 END 0 ‘:’ ‘0’ ‘1’ ‘9’ ‘0’ ‘0’ ‘2’ ‘6’ ‘D’ CR LF VFD-F 系列 資料量(Byte) 第一筆 資料 第二筆 資料 LRC CHK 1 LRC CHK 0 END 1 END 0 ‘0’ ‘4’ ‘1’ ‘3’ ‘8’ ‘8’ ‘0’ ‘F’ ‘A’ ‘0’ ‘9’ ‘A’ CR LF LRC CHK 1 LRC CHK 0 END 1 END 0 ‘E’ ‘8’ CR LF RTU 模式: 命令訊息: ADR CMD 資料 起始位址 資料量 (Word) 資料量(Byte) 第一筆 資料 第二筆 資料 CRC CHK LOW CRC CHK HIGH 01H 10H 05H 00H 00H’ 02H 04 13H 88H 0FH A0H ‘9’ ‘A’ 回應訊息: ADR CMD 1 資料 起始位址 資料量 (Word) CRC CHK LOW CRC CHK HIGH 01H 10H 05H 00H 00H 02H 41H 04H 錯誤回應訊息: ADR CMD 1 錯誤碼 LRC CHK 1 END 1 01H 90H ‘0’ ‘2’ ‘D’ CR CHK(check sum:偵誤值) ASCII 模式: ASCII 模式採用 LRC (Longitudinal Redundancy Check) 偵誤值。LRC 偵誤值乃是將 ADR1 至 最後一個資料內容加總,得到之結果以 256 為單位,超出之部分去除(例如得到之結果為十六進 位之 128H 則只取 28H),然後計算二的補數後得到之結果即為 LRC 偵誤值。 例如:從位址為 01H 之驅動器的 0401H 位址讀取 1 個字。 STX ADR 1 ADR 0 ‘:’ ‘0’ ‘1’ 5-45 第 五 章 VFD-F 系列 CMD 1 CMD 0 啟始資料位址 資料數 LRC CHK 1 LRC CHK 0 END 1 END 0 ‘0’ ‘3’ ‘0’ ‘4’ ‘0’ ‘1’ ‘0’ ‘0’ ‘0’ ‘1’ ‘F’ ‘6’ CR LF 01H+03H+04H+01H+00H+01H=0AH, 0AH 的二的補數為 F6H。 RTU 模式: RTU 模式採用 CRC (Cyclical Redundancy Check)偵誤值,CRC 偵誤值以下列步驟計算: 步驟 1:載入一個內容為 FFFFH 之 16-bit 暫存器 (稱為 CRC 暫存器)。 步驟 2:將命令訊息第一個位元組與 16-bit CRC 暫存器的低次位元組進行 Exclusive OR 運 算,並將結果存回 CRC 暫存器。 步驟 3:將 CRC 暫存器之內容向右移 1 bit,最左 bit 填入 0,檢查 CRC 暫存器最低位元的值。 步驟 4:若 CRC 暫存器的最低位元為 0,則重覆步驟 3;否則將 CRC 暫存器與 A001H 進行 Exclusive OR 運算。 步驟 5:重覆步驟 3 及步驟 4,直到 CRC 暫存器之內容已被右移了 8 bits。此時,該位元組 已完成處理。 步驟 6:對命令訊息下一個位元組重覆重覆步驟 2 至步驟 5,直到所有位元組皆完成處理,CRC 暫存器的最後內容即是 CRC 值。當在命令訊息中傳遞 CRC 值時,低位元組須與高 位元組交換順序,亦即,低位元組將先被傳送。 例如,從位址為 01H 之交流電機驅動器的 2102H 位址讀取 2 個字,從 ADR 至資料數之最後一 位元組所計算出之 CRC 暫存器之最後內容為 F76FH,則其命令訊息如下所示,其中 6FH 於 F7H 之前傳送: 命令訊息: ADR 01H CMD 03H 啟始資料位址 21H 5-46 VFD-F 系列 資料數 (以 word 計算) CRC CHK Low CRC CHK High 02H 00H 02H 6FH F7H 範例 下例乃以 C 語言產生 CRC 值。此函數(function)需要兩個參數: Unsigned char* data Å 指向訊息緩衝區(buffer)之指標 Unsigned char length Å 訊息緩衝區中之位元組數目 此函數將傳回 unsigned integer 型態之 CRC 值。 unsigned int crc_chk(unsigned char* data, unsigned char length){ int j; unsigned int reg_crc=0xFFFF; while(length--){ reg_crc ^= *data++; for(j=0;j<8;j++){ if(reg_crc & 0x01){ reg_crc=(reg_crc>>1) ^ 0xA001; }else{ reg_crc=reg_crc >>1; } } } return reg_crc; } 5-47 第 五 章 VFD-F 系列 10 回授控制參數 10-00 檢出值端子選擇 設定範圍 00 01 02 03 04 出廠設定值 00 無功能 由 AVI 輸入 由 ACI1 輸入 由 ACI2 輸入 由 External Reference 輸入 此參數設定 PID 控制之回授信號來源,可設定為 AVI、ACI1、ACI2 或由 04-24 所定義之 External Reference。 此參數設定為 00 時,PID 回授控制功能無效。 此參數設定為 00 以外的值時,驅動器自動啟動 PID 回授控制,輸出頻率由主頻率與 PID 回 授信號,經由計算得到。 目標值 02-00 + 正/負回授 10-02 誤差量 P I 10-03 10-04 積分上限 10-06 + + 一次延遲 + 10-07 頻率上下限 D 01-07 01-08 10-05 檢出信號 10-00 頻率命令 10-01 PID 控制檢出信號參考值 出廠設定值 1000.0 設定範圍 0.0-6550.0 此參數設定 PID 回授控制時,檢出信號的參考值,參考 04-09∼04-20。 10-02 PID 回授控制方式 出廠設定值 00 設定範圍 00 負回授控制 01 正回授控制 此參數可設定 PID 回授控制迴路中,誤差量信號的計算方式。 此參數設定為 00:負回授控制時,誤差量的計算公式為誤差量 = 目標值 – 檢出信號。當 增加輸出頻率會使檢出值的大小增加時,應選擇此設定。 此參數設定為 01:正回授控制時,誤差量的計算公式為誤差量 = 檢出信號 – 目標值。當 5-48 VFD-F 系列 增加輸出頻率會使檢出值的大小減少時,應選擇此設定。 10-03 P 增益 出廠設定值 1.0 設定範圍 0.0-10.0 此參數可設定 P 控制器的增益,此增益決定 P 控制器對回授誤差量的響應程度,增益取大 時,響應快、但過大將產生震盪。增益取小時,響應遲緩。 10-04 積分時間( I ) 出廠設定值 1.00 設定範圍 0.00-100.00 s 此參數可設定 I 控制器的積分時間,積分時間大時,表示 I 控制器的增益小、響應遲緩、對 外部擾動的控制能力差。積分時間小時,表示 I 控制器的增益大、響應速度快、對外部擾動 可快速響應。 積分時間太小時,輸出頻率與系統可能產生過衝甚至震盪。 積分時間設為 0.00 時,表示關閉 I 控制器。 10-05 微分時間( D ) 出廠設定值 0.00 設定範圍 0.00-1.00 s 此參數可設定 D 控制器的增益,此增益決定 D 控制器對誤差量的變化量的響應程度。適當 的微分時間可以使 P 與 I 控制器的過衝量減小,震盪很快衰減並穩定下來。但是微分時間太 大時,本身即可能引起系統震盪。 微分控制器對誤差量的變化量動作,因此干擾的免疫能力較差。一般建議不使用,尤其是在 干擾較大的環境中。 10-06 積分上限值 出廠設定值 100 設定範圍 00-200 % 此參數可設定 I 控制器的輸出上限,亦即積分上限頻率 = (01-00)×(10-04)% 10-07 一次延遲 出廠設定值 0.0 設定範圍 0.0-2.5 s 此參數設定一次延遲的濾波程度。 PID 控制器的頻率輸出會經由一次延遲功能作濾波。此功能可使輸出頻率的變化程度減緩, 一次延遲時間長表示濾波程度大,反之亦然。 不適當的一次延遲時間設定可能造成系統震盪。 5-49 第 五 章 VFD-F 系列 10-08 PID 誤差量異常 出廠設定值 600.0 設定範圍 0.0~6550.0 此參數設定可允許 PID 誤差量的最大值,對應到 10-01 所設定之設定值。 若 PID 功能正常,在一定時間內,應可檢出信號逼近目標值。假如驅動器在 10-09 所設定 的時間內,無法將誤差量控制在 10-08 所設定範圍之內,則判定 PID 回授控制發生異常其 處理方式如 10-10 所設定。 10-09 PID 誤差量異常偵測時間 出廠設定值 0.0 設定範圍 0.0-3600.0 此參數設定 PID 誤差量異常的偵測時間,設 定範圍若為 0.0 表示不偵測。 10-10 PID 誤差量異常處理方式 a 設定範圍 00 警告並繼續運轉 01 警告且減速停車 02 警告且自由停車 此參數設定 PID 誤差量異常的處理方式。 5-50 出廠設定值 01 VFD-F 系列 11 多組電機控制參數 11-00 V∕F 曲線選擇 設定範圍 00 01 02 03 04 出廠設定值﹕ 00 任意 V/F 曲線(由參數群 01 設定) 1.5 次方曲線 1.7 次方曲線 2 次方曲線 3 次方曲線 此參數設定 V/F 曲線。若設定為 00 以外的值,參數 01-03 與 01-04 無效。 電機的輸入電流可以分解為兩個彼此正交的分量,磁場分量與轉矩分量。磁場分量產生氣隙 磁通,與電機輸入電壓成正比。轉矩分量產生轉矩,轉矩與磁場分量和轉矩分量的乘積成正 比,理論上若磁場分量與轉矩分量的大小相同(磁通不飽和的條件下) ,可使輸入電流值最 小。如果電機的負載為變轉矩負載(負載轉矩與轉速成正比,如風機或水泵等負載) ,轉速 低時負載轉矩較低,可適當降低輸入電壓使輸入電流的磁場變小,以降低電機的磁通損與鐵 損,提高整體效率。 設定高次方的 V/F 曲線時,低頻轉矩較低,驅動器不適合做快速的加減速。如果需要快速的 加減速,建議不要使用此參數。 V∕F 曲線如下: 01-02 電壓% 100 90 80 70 60 50 40 30 20 10 0 1.5次方曲線 1.7次方曲線 2次方曲線 3次方曲線 20 60 40 80 頻 率 01-01 % 100 V/F次方曲線圖 11-01 循環控制 出廠設定值 00 設定範圍 00 無功能 01 定時循環(依時間) 02 定量循環(依 PID) 此參數設定一台驅動器帶動多組電機,作循環控制的模式。 設定為 01 定時循環控制時,驅動器可帶動 4 台電機(由 11-02 設定) ,四台電機依序運轉 固定的時間(11-03)。 5-51 第 五 章 VFD-F 系列 設定為 02 定量循環控制時,驅動器可帶動 4 台電機(由 11-02 設定) ,四台電機依 PID 運 算結果,依序由驅動器或市電帶動。 此參數設定為 00 以外的值時,03-00~03-07 多功能輸出端子會自動設為對應之輸出電機。 設為 02 定量控制時,PID 控制(參數群 10)必須設定適當值。 UVW 1 Relay Output 2 3 4 L N M M 11-02 多組電機控制 出廠設定值 01 設定範圍 01-04 此參數設定多組電機控制時多功能輸出端子 03-00~03-07 會自動設定為適當值,如下表所 示,使用者必須正確連接輸出端子,才可達到循環控制。 11-01 循環 方式 11-02 01 電機 數量 03-00 01 電機一由驅 動器帶動 01 定時循環 02 03 02 定量循環 04 01 02 03 04 01 01 01 01 01 01 01 電機一由驅 電機一由驅 電機一由驅 電機一由驅 電機一由驅 電機一由驅 電機一由驅 動器帶動 動器帶動 動器帶動 動器帶動 動器帶動 動器帶動 動器帶動 5-52 VFD-F 系列 03-01 N/A 03-02 N/A 02 電機二由驅 動器帶動 N/A 03-03 N/A N/A 02 電機二由驅 動器帶動 03 電機三由驅 動器帶動 N/A 03-04 N/A N/A N/A 02 電機二由驅 動器帶動 03 電機三由驅 動器帶動 04 電機四由驅 動器帶動 N/A 02 N/A N/A 02 電機一由市 電帶動 03 電機二由驅 動器帶動 04 電機二由市 電帶動 N/A 03-05 N/A N/A N/A N/A N/A N/A 03-06 N/A N/A N/A N/A N/A N/A 02 電機一由市 電帶動 03 電機二由驅 動器帶動 04 電機二由市 電帶動 05 電機三由驅 動器帶動 06 電機三由市 電帶動 N/A 03-07 N/A N/A N/A N/A N/A N/A N/A N/A N/A 11-03 定時循環時間設定 02 電機一由市 電帶動 03 電機二由驅 動器帶動 04 電機二由市 電帶動 05 電機三由驅 動器帶動 06 電機三由市 電帶動 07 電機四由驅 動器帶動 08 電機四由市 電帶動 出廠設定值 00 設定範圍 00∼65500 Min 此參數設定多組電機作定時循環時,每組電機的運轉時間(包含加速時間在內) 。若設定為 00,則定時功能無效,只以一組電機運轉。 多功能輸入段子 04-00~04-07 設為 27~31 電機失效時,對應的輸出端子將會跳過不動作。下 圖所示為電機三失效時之定時循環控制的動作時序。 正由驅動器帶動中的電機不接受電機失效命令。 定時循環作切換時,動作中的電機作自由減速煞車,驅動器不提供選項。 輸出 頻率 03-00=01 03-01=02 03-02=03 03-03=04 Run 11-04 11-03 5-53 11-01=01 11-02=04 04-00=29 電機三失效 第 五 章 VFD-F 系列 11-04 循環控制電機切換延遲時間 出廠設定值 1.0 設定範圍 0.0-3600.0 s 此參數定義作定時循環控制時,兩組電機動作的時間間隔。為避免水錘效應對驅動器,電機 或系統造成破壞,使用者必須設定適當之時間延遲。 此參數同時定義作定量循環控制時,電機切離驅動器與並入市電運轉之時間間隔。使用者必 須設定適當之時間延遲,以使電機無衝擊並入市電運轉。 11-05 定量循環電機切換延遲時間 出廠設定值 10.0 設定範圍 0.0-3600.0 s 此參數設定定量循環控制時,驅動器輸出頻率到達 11-06 電機切換頻率與電機切離驅動器之 時間間隔。 如下圖所示,輸出頻率到達 11-06 電機切換頻率之後,電機並不馬上進行切換,而是等待 11-05 所設定的延遲時間之後,才作循環控制之電機切換動作。適當的延遲時間設定,可以 減少電機切換的次數。 電機切離驅動器之後,依其負載特性作自由停車,使用者必須依據實際狀況,設定 11-06 電機切換頻率與 11-04 循環控制之時間延遲,使電機並入市電運轉時,其轉子速度等於市電 頻率。 11-06 電機一轉速 驅動器輸出頻率 市電頻率 11-08 01-06 RUN 03-00=01 03-01=02 03-02=03 03-03=04 11-05 11-04 11-07 11-07 11-04 11-06 定量循環時電機切換頻率 出廠設定值 60.00 設定範圍 0.00 to 120.00 Hz 此參數設定作定量循環控制時,電機要並入市電運轉的頻率。此參數設定應略高於市電頻 率。若驅動器的輸出頻率到達電機切換頻率,表示即使此電機全速運轉,也無法使 PID 控制 5-54 VFD-F 系列 之檢出值到達目標值,因此必須將此電機切離驅動器,並入市電運轉,驅動器帶動下依台電 機,以使檢出值逼近目標值。 定量循環 控制程序 PID控制 計算H H>(11-06) H<(11-08) H T2=T2+1 T2>(11-05) T1=0 T2=0 T1=T1+1 NO NO T1>(11-07) YES 第 五 章 YES YES 是否有電機 尚未運轉 NO 是否有電機 為市電帶動 N=OFF H=0 NO YES 睡眠程序 依序切離市電 T1=0 定量循環 切換程序 T1 為睡眠程序計時(11-07) T2 為定量電機切換延遲計時(11-05) T3 電機切換延遲計時(11-04) 5-55 VFD-F 系列 定量循環 控制程序 T3=T3+1 T3=(11-04) NO PID 計算F YES N+1 ON T3=0 睡眠程序 T3=T3+1 PID T3=(11-04) NO 計算F PID 計算F YES F>(11-09) N+2 ON T3=0 NO YES 定量循環 定量循環 控制程序 控制程序 11-07 進入睡眠程序之時間 出廠設定值 0.0 設定範圍 0.0~3600.0 s 0.0 表示睡眠功能無效 此參數設定驅動器輸出頻率小於睡眠頻率,與進入睡眠程序之時間間隔。 若驅動器開始運轉時,PID 運算的頻率命令即小於睡眠頻率,則驅動器立即進入睡眠狀態, 不受此參數限制。 11-08 睡眠程序之睡眠頻率 出廠設定值 設定範圍 0.00~11-09(喚醒頻率) 此參數設定驅動器進入睡眠程序的頻率。 驅動器進入睡眠狀態之後,停止輸出信號,但是 PID 控制器仍然繼續工作。 5-56 0.00 VFD-F 系列 11-09 睡眠程序之喚醒頻率 出廠設定值 0.00 設定範圍 0.00~120.00 Hz 此參數設定驅動器進入睡眠程序後的喚醒頻率。 驅動器在睡眠程序中,PID 控制功能仍然繼續計算頻率命令 F,當頻率命令到達喚醒頻率時, 驅動器將由 01-05 最低頻率設定延 V/F 曲線加速。 喚醒頻率設定必須大於睡眠頻率。 頻率 PID計算之頻率命令 11-09 減速時間 限制 11-08 輸出頻率 01-08 加速時間 限制 01-05 第 五 章 時間 11-07 11-10 定量循環故障處理 出廠設定值 00 設定範圍 00 電機均停止運轉 01 電機停止輸出,但市電驅動之電機繼續運轉 此參數設定定量循環控制,驅動器出現故障的處理模式。 設為 00:關閉所有輸出時,所有電機均停止運轉。 設為 01:時,驅動器帶動之電機停止輸出,市電驅動之電機繼續運轉。 若驅動器功率電路發生故障,致使其輔助電源失效,微處理器無法工作時,所有輸出會自動 關閉。 5-57 VFD-F 系列 第六章 參數一覽表 00 用戶參數 a表示可在運轉中執行設定功能 參數 通訊 參數功能 代號 位址 00-00 0000H 軟體版本 00-01 0001H 監視驅動器狀態 (錯誤代碼) 00-02 0002H LED 狀態 設定範圍 客戶 出廠設定 設定 僅供讀取 00 00:無異常 01:oc(過電流) 02:ov(過電壓) 03:oH(過熱) 04:oL(驅動器過載) 05:oL1(電子熱動電驛) 06:EF(外部異常) 07:occ(驅動模組異常) 08:CF3(硬體線路異常) 09:HPF(保護線路異常) 10:ocA(加速中過電流) 11:ocd(減速中過電流) 12:ocn(恆速中過電流) 13:GFF(接地故障) 14:Lv(低電壓) 15:CF1(寫入異常) 16:CF2(讀出異常) 17:bb(外部遮斷) 18:oL2(電機過載) 19:保留 20:codE(軟體或密碼保護) 21:EF1(外部緊急停止) 22:PHL(欠相) 23:Lc(低電流) 24:FbL(回授信號錯誤) Bit 0-1 00B:RUN LED OFF STOP 僅供讀取 LED ON 01B:RUN LED BLINK STOP LED ON 10B:RUN LED ON STOP LED BLINK 11B:RUN LED ON STOP LED OFF 6-1 第 六 章 VFD-F 系列 驅動器狀態 00-03 00-04 00-05 00-06 00-07 00-08 00-09 00-10 00-11 00-12 00-13 0003H 0004H 0005H 0004H 0007H 0008H 0009H 000AH 000BH 000CH 000DH 設定頻率(F) 輸出頻率(H) 輸出電流(A) DC-BUS 電壓(U) 輸出電壓(E) 輸出功因角度(n) 輸出功率(P/q)KW 回授信號實際值 回授信號(%) 使用者輸出(Low) 使用者輸出(High) Bit 2 1B:JOG ON Bit 3-4 00B:REV LED OFF FWD LED ON 01B:REV LED BLINK FWD LED ON 10B:REV LED ON FWD LED BLINK 11B:REV LED ON FWD LED OFF Bit 5-7:保留 Bit8:主頻率來源由通訊界面 Bit9:主頻率來源由模擬輸入 Bit10:運轉指令由通訊界面 Bit11:參數鎖定 Bit12:保留 Bit13:保留 Bit14~15:保留 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 僅供讀取 uL0–99.99 uH0-9999 01 基本參數 參數 代號 01-00 01-01 01-02 01-03 01-04 01-05 01-06 01-07 01-08 a 01-09 通訊 位址 0100H 0101H 0102H 0103H 0104H 0105H 0106H 0107H 0108H 0109H 參數功能 最高操作頻率 最大電壓頻率 最高輸出電壓 中間輸出電壓頻率 中間輸出電壓 最低操作頻率 最低輸出電壓 上限頻率 下限頻率 第一加速時間 設定範圍 50.00∼120.00 Hz 0.10∼120.00 Hz 0.2V∼510.0V 0.10∼120.00 Hz 0.2V∼510.0V 0.10∼20.00 Hz 0.2V∼100.0V 0.00∼120.00 Hz 0.00∼120.00 Hz 0.1∼3600.0 s 6-2 客戶 出廠設定 設定 60.00 60.00 440.0 1.50 11.0 1.50 11.0 60.00 0.00 10.0/60.0 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFD-F 系列 第一減速時間 第二加速時間 第二減速時間 第三加速時間 第三減速時間 第四加速時間 第四減速時間 JOG 加速設定 JOG 減速設定 JOG 頻率設定 加速 S 曲線延遲時 間 01-21 0115H 減速 S 曲線延遲時 間 a 01-22 0116H 調變指數 01-23 0117H 加減速時間單位設 定(01-09~0118) a a a a a a a a a a 01-10 01-11 01-12 01-13 01-14 01-15 01-16 01-17 01-18 01-19 01-20 010AH 010BH 010CH 010DH 010EH 010FH 0110H 0111H 0112H 0113H 0114H 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.1∼3600.0 s 0.00 Hz∼120.00 Hz 0.00∼2.50 s 10.0/60.0 10.0/60.0 10.0/60.0 10.0/60.0 10.0/60.0 10.0/60.0 10.0/60.0 10.0/60.0 10.0/60.0 6.00 0.00 0.00∼2.50 s 0.00 0.90∼1.20 00:以 1 s 為單位 01:以 0.1 s 為單位 02:以 0.01 s 為單位 1.00 01 02 操作方式參數 參數 通訊 參數功能 代號 位址 a 02-00 0200H 頻率指令來源 a 02-01 0201H 運轉指令來源 02-02 0202H 停車方式 a 02-03 0203H 載波頻率設定 設定範圍 00:由鍵盤輸入 01:由模擬輸入 ACI 02:由模擬輸入 ACI1 03:由模擬輸入 ACI2 04:由通訊 RS485 輸入 05:由 External Reference 00:由鍵盤操作 01:由外部端子操作,鍵盤 STOP 鍵有 效 02:由外部端子操作,鍵盤 STOP 鍵無 效 03:由 RS-485 通訊界面操作,鍵盤 STOP 鍵有效 04:由 RS-485 通訊界面操作,鍵盤 STOP 鍵無效 00:Stop 減速停止,EF 自由停止 01:Stop 自由停止,EF 自由停止 02:Stop 減速停止,EF 減速停止 03:Stop 自由停止,EF 減速停止 1k∼10 kHz 6-3 客戶 出廠設定 設定 00 00 00 ## 第 六 章 VFD-F 系列 02-04 0204H 正反轉禁止 00:可正反轉 01:禁止反轉 02:禁止正轉 02-05 0205H 二/三線式選擇 00:二線式(1),RUN/FWD, RUN/REV 01:二線式(2),RUN/STOP, FWD/REV 02:三線式 02-06 0206H 電源起動運轉鎖定 00:可運轉 01:鎖定運轉 02-07 0207H ACI 斷線處理 00:減速至 0Hz 01:E.F 02:以斷線前頻率運轉 Bit0~1 00B=F LED a 02-08 0208H 開機狀態預設 01B=H LED 10B=u LED (特殊顯示) 11B=Frd / Rev Bit2 0B:Fwd LED 1B:Rev LED Bit3~5 000B=1st 7-seg 001B=2nd 7-seg 010B=3rd 7-seg 011B=4th 7-seg 100B=5th 7-seg Bit6~7 保留 a 02-09 0209H 特殊顯示 00:A 01:U DC-Bus 02:E Out-put Volt 03:P 回授信號實際值 a 02-10 020AH 使用者定義比例 0.01∼160.00 a 02-11 020BH 啟動時速度追蹤 00:Disable 01:Enable (直流制動無效) a 02-12 020CH 啟動時速度追蹤起 00:Current Setpoint 始頻率 01:Maximum Frequency (01-00) a 02-13 020DH 主頻率記憶設定 00:無記憶 01:有記憶 00 00 01 01 00 00 1.00 00 00 01 03 輸出功能參數 參數 代號 03-00 03-01 03-02 03-03 通訊 位址 0300H 0301H 0302H 0303H 參數功能 多功能輸出 1 多功能輸出 2 多功能輸出 3 多功能輸出 4 設定範圍 00:無功能 01:Motor NO.1 02:Motor NO.2 03:Motor NO.3 6-4 客戶 出廠設定 設定 00 00 00 00 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFD-F 系列 03-04 03-05 03-06 03-07 0304H 0305H 0306H 0307H 03-08 0308H 03-09 0309H 03-10 030AH 03-11 030BH a 03-12 030CH a 03-13 030DH 03-14 030EH 03-15 多功能輸出 5 多功能輸出 6 多功能輸出 7 多功能輸出 8 04:Motor NO.4 05:Motor NO.5 06:Motor NO.6 07:Motor NO.7 08:Motor NO.8 09:輔助機 1 輸出 10:輔助機 2 輸出 11:輔助機 3 輸出 12:輔助機 4 輸出 13:輔助機 5 輸出 14:輔助機 6 輸出 15:輔助機 7 輸出 16:運轉中指示 17:設定到達頻率 18:零速(含停機) 19:過轉矩 20:外部中斷 21:低電壓檢出 22:變頻器操作模式 23:故障指示 24:任意頻率一到達 25:任意頻率二到達 26:散熱片過熱警告 27:驅動器準備完成 28:緊急停止指示(EF1) 29:軟體煞車輸出 30:oL 或 OL1 過載警告 31:休眠指示(SLEEP) 32:低電流指示(Low Current) 33:PID Feedback Loss 指示 任意頻率一到達 0.00∼120.00 Hz 任意頻率二到達 0.00∼120.00 Hz 模擬輸出選擇 1 00:輸出頻率 AFM1 0~10V 01:輸出電流 模擬輸出選擇 2 02:輸出電壓 AFM2 0/4~ 20mA 03:頻率指令 04:負載功因 模擬輸出增益 1 01∼200 % 模擬輸出增益 2 01∼200 % 模擬輸出選擇 2 00:0∼20mA AFM2 定義 01:4∼20mA 保留 6-5 00 00 00 00 第 六 章 0.00 0.00 00 01 100 100 01 VFD-F 系列 04 輸入功能參數 參數 代號 04-00 04-01 04-02 04-03 04-04 04-05 04-06 04-07 通訊 位址 0400H 0401H 0402H 0403H 0404H 0405H 0406H 0407H 參數功能 設定範圍 多功能輸入指令ㄧ 多功能輸入指令二 多功能輸入指令三 多功能輸入指令四 多功能輸入指令五 多功能輸入指令六 多功能輸入指令七 多功能輸入指令八 00:無功能 01:多段速一 02:多段速二 03:多段速三 04:多段速四 05:Reset(NO) 06:Reset(NC) 07:寸動運轉(JOG) 08:加減速禁止指令 09:第一、二加減速時間切換 10:第三、四加減速時間切換 11:B.B(NO)輸入 12:B.B(NC)輸入 13:Up Command 14:Down Command 15:緊急停止 EF1(NO) 16:緊急停止 EF1(NC) 17:ACH1 (open),ACH2 (close) 18:KEYPAD (open),EXT (close) 19:PID 失效 20:輔助機 1 輸入 21:輔助機 2 輸入 22:輔助機 3 輸入 23:輔助機 4 輸入 24:輔助機 5 輸入 25:輔助機 6 輸入 26:輔助機 7 輸入 27:Motor NO.1 輸出失效 28:Motor NO.2 輸出失效 29:Motor NO.3 輸出失效 30:Motor NO.4 輸出失效 31:所有電機輸出失效 04-08 0408H 數字輸入的響應時 01∼20 間 04-09 0409H ACH1(V) Minimum 0.0 to 10.0V scaling 6-6 客戶 出廠設定 設定 01 02 03 04 05 07 08 09 01 0.0 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFD-F 系列 04-10 040AH AVI Maximum scaling 04-11 040BH AVI Minimum scaling percentage 04-12 040CH AVI Maximum scaling percentage 04-13 040DH ACI1 Minimum scaling 04-14 040EH ACI1 Maximum scaling 04-15 040FH ACI1 Minimum scaling percentage 04-16 0410H ACI1 Maximum scaling percentage 04-17 0411H ACI2 Minimum scaling 04-18 0412H ACI2 Maximum scaling 04-19 0413H ACI2 Minimum scaling percentage 04-20 0414H ACI2 Maximum scaling percentage 04-21 040FH ACH1 模擬輸入延 遲 04-22 0410H ACH2 模擬輸入延 遲 04-23 0411H ACH3 模擬輸入延 遲 04-24 0412H 定義 External Reference 來源 0.0 to 10.0V 10.0 0.00 to 100.00% 0.00 0.00 to 100.00% 100.00 0.0 to 20.0mA 4.0 0.0 to 20.0mA 20.0 0.00 to 100.00% 0.00 0.00 to 100.00% 100.00 0.0 to 20.0mA 4.0 0.0 to20.0mA 20.0 0.00 to 100.00% 0.00 0.00 to 100.00% 100.00 0.00 to 10.00 s 0.50 0.00 to 10.00 s 0.50 0.00 to 10.00 s 0.50 00:無功能 01:ACH1V+ACH2A 02:ACH2A+ACH3V 03:ACH3V+ACH1V 04:通訊主頻率+ACH1V 05:通訊主頻率+ACH2A 06:通訊主頻率+ACH3V 第 六 章 00 05 多段速參數 a a a a a 參數 代號 05-00 05-01 05-02 05-03 05-04 通訊 位址 0500H 0501H 0502H 0503H 0504H 參數功能 第一段速 第二段速 第三段速 第四段速 第五段速 設定範圍 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 6-7 客戶 出廠設定 設定 0.00 0.00 0.00 0.00 0.00 VFD-F 系列 a a a a a a a a a a 05-05 05-06 05-07 05-08 05-09 05-10 05-11 05-12 05-13 05-14 0505H 0506H 0507H 0508H 0509H 050AH 050BH 050CH 050DH 050EH 第六段速 第七段速 第八段速 第九段速 第十段速 第十一段速 第十二段速 第十三段速 第十四段速 第十五段速 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 0.00∼120.00 Hz 06 保護功能參數 參數 通訊 參數功能 代號 位址 06-00 0600H 失速防止電壓準位 06-01 0601H 加速中過電流失速 防止 06-02 0602H 運轉中過電流失速 防止 06-03 0603H 過轉矩檢出功能選 擇 06-04 06-05 06-06 06-07 06-08 06-09 06-10 0604H 0605H 0606H 0607H 0608H 0609H 060AH 過轉矩檢出位準 過轉矩檢出時間 電子熱電驛選擇 熱電驛作用時間 低電流檢出位準 低電流檢出時間 低電流檢出處理 06-11 060BH 最近第一異常記錄 06-12 060CH 最近第二異常記錄 06-13 060DH 最近第三異常記錄 設定範圍 660V∼820VDC 00:Disable 20∼150% 00:Disable 20∼150% 00:Disable 00:不檢測 01:定速運轉中過轉矩偵測,(oL2)繼續 運轉 02:定速運轉中過轉矩偵測,(oL2)停止 運轉 03:運轉中過轉矩偵測,(oL2)繼續運轉 04:運轉中過轉矩偵測,(oL2)停止運轉 30∼150% 0.1∼60.0 s 0∼2 30∼600 s 00∼100% (00 不作用) 0.0~ 3600.0 s 00:警告並減速停車 01:警告並自由停車 02:警告並繼續運轉 00:無異常記錄 01:oc(過電流) 02:ov(過電壓) 6-8 客戶 出廠設定 設定 780.0 120 120 00 110 0.1 02 60 00 10.0 01 00 00 00 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFD-F 系列 06-14 060EH 最近第四異常記錄 03:oH(過熱) 04:oL(驅動器過載) 05:oL1(電子熱動電驛) 06:EF(外部異常) 07:occ(驅動模組異常) 08:CF3(硬體線路異常) 09:HPF(保護線路異常) 10:ocA(加速中過電流) 11:ocd(減速中過電流) 12:ocn(恆速中過電流) 13:GFF(接地故障) 14:保留 15:CF1(寫入異常) 16:CF2(讀出異常) 17:保留 18:oL2(電機過載) 19:保留 20:codE(軟體或密碼保護) 21:EF1(外部緊急停止) 22:PHL(欠相) 06-15 060FH 參數重置設定 10:參數重置 06-16 0610H 參數保護密碼輸入 00∼65535 06-17 0611H 參數保護密碼設定 00∼65535 00 00 00 00 第 六 章 07 電機參數 a a a a a 參數 代號 07-00 07-01 07-02 07-03 07-04 07-05 07-06 07-07 07-08 通訊 位址 0700H 0701H 0702H 0703H 0704H 0705H 0706H 0707H 0708H 參數功能 設定範圍 變頻器機種識別 依機種顯示 變頻器額定電流 依機種顯示 電機滿載電流 30∼120 % 電機無載電流 1∼99 % 自動轉差補償增益 0.0∼3.0 電機額定轉差 0.00∼20.00 Hz 自動轉矩補償增益 00∼10 手動轉矩補償增益 0.0∼10.0 累計電機運轉時間 00 to 1439 Min (Min) 07-09 0709H 累計電機運轉時間 00 to 65535 Day (Day) 6-9 客戶 出廠設定 設定 工廠設定 工廠設定 100% 30% 0.0 0.00 00 0.0 00 00 VFD-F 系列 08 特殊參數 參數 通訊 參數功能 設定範圍 代號 位址 08-00 0800H 直流制動電流準位 00∼100 % 08-01 0801H 啟動時直流制動時 0.0∼60.0 s 間 08-02 0802H 停止時直流制動時 0.0∼60.0 s 間 08-03 0803H 直流制動的起始頻 0.0∼120.00 Hz 率 08-04 0804H 瞬時停電再啟動 00:無效 01:由上往下追蹤 02:由下往上追蹤 08-05 0805H 允許停電時間 0.1∼5.0 s 08-06 0806H 速度追蹤時間 0.1∼5.0 s 08-07 0807H 速度追蹤最大電流 30∼150% 08-08 0808H BB 速度追蹤方式 0:由上往下追蹤 1:由下往上追蹤 08-09 0809H 異常再啟動次數 00 ∼10 08-10 080AH 異常再啟動次數自 00 to 60000 s 動復歸時間 08-11 080BH 禁止設定頻率 1 UP 0.00∼120.00 Hz 08-12 080CH 禁止設定頻率 1 0.00∼120.00 Hz DOWN 08-13 080DH 禁止設定頻率 2 UP 0.00∼120.00 Hz 08-14 080EH 禁止設定頻率 2 0.00∼120.00 Hz DOWN 08-15 080FH 禁止設定頻率 3 UP 0.00∼120.00 Hz 08-16 0810H 禁止設定頻率 3 0.00∼120.00 Hz DOWN 08-17 0811H 自動省電運轉 00:無效 01:有效 08-18 0812H 自動穩壓功能(AVR) 00:開啟 AVR 01:取消 AVR 02:停車減速時取消 AVR a 08-19 0813 軟體煞車位準設定 740V~820VDC 00:Disable 6-10 客戶 出廠設定 設定 00 0.0 0.0 0.00 00 2.0 0.5 110 00 00 600 0.00 0.00 0.00 0.00 0.00 0.00 00 00 760.0 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFD-F 系列 09 通訊參數 參數 通訊 參數功能 代號 位址 a 09-00 0900H 通訊位址 a 09-01 0901H 通訊傳送速度 a 09-02 a 09-03 a 09-04 a 09-05 a 09-06 設定範圍 01∼254 00:Baud rate 4800 01:Baud rate 9600 02:Baud rate 19200 03:Baud rate 38400 0902H 傳輸錯誤處理 00:警告並繼續運轉 01:警告且減速停車 02:警告且自由停車 03:不處理也不顯示 0903H 逾時檢出 00:無檢出 01:有檢出 0904H 通訊格式 00:7-bit for ASCII 01:8-bit for ASCII 02:8-bit for RTU 0905H 奇偶位元及停止位 00:None parity + 2 stop bit 元設定 01:Even parity + 2 stop bit 02:Odd parity + 2 stop bit 03:None parity + 1 stop bit 04:Even parity + 1 stop bit 05:Odd parity + 1 stop bit Bit0~1 00B:無功能 0906H 對驅動器的命令 (運轉指令命令) 01B:停止 10B:啟動 11B:JOG 啟動 Bit2~3:保留 Bit4~5 00B:無功能 01B:正方向指令 10B:反方向指令 11B:改變方向指令 Bit 6~7 00B:第一段加減速 01B:第二段加減速 10B:第三段加減速 11B:第四段加減速 Bit 0000B:主速 8~11 0001B:第一段速 0010B:第二段速 0011B:第三段速 6-11 客戶 出廠設定 設定 01 01 03 00 00 00 第 六 章 00 VFD-F 系列 a 09-07 0907H 通訊頻率設定 a 09-08 0908H 通訊運轉命令二 0100B:第四段速 0101B:第五段速 0110B:第六段速 0111B:第七段速 1000B:第八段速 1001B:第九段速 1010B:第十段速 1011B:第十一段速 1100B:第十二段速 1101B:第十三段速 1110B:第十四段速 1111B:第十五段速 Bit 12:選擇 Bit 13~15:保留 頻率設定 Bit0 1:EF ON Bit1 1:Reset Bit2 0:BB OFF 1:BB ON Bit3~15:保留 60.00 00 10 回授控制參數 參數 通訊 參數功能 代號 位址 10-00 0A00H 回授信號選擇 10-01 0A01H 10-02 0A02H 10-03 10-04 10-05 10-06 10-07 10-08 0A03H 0A04H 0A05H 0A06H 0A07H 0A08H 10-09 0A09H 客戶 設定範圍 00:無功能 01:由 AVI 輸入 02:由 ACI1 輸入 03:由 ACI2 輸入 04:由 External Reference 輸入 回授信號對應最大 0.0∼6550.0 物理量 PID Normal/Inverse 00:Normal (Err=SP-FB) Control 01:Inverse (Err=FB-SP) P 增益 0.0∼10.0 I 積分時間 0.00∼100.00 s D 微分時間 0.00∼1.00 s 積分上限 00∼200% Output Time Delay 0.0∼2.5 s PID 回授訊號異常 0.0~10-01(對應 10-01 設定) 偏差量 回授訊號異常偵測 0.0∼3600.0 s 6-12 出廠設定 設定 00 1000.0 00 1.0 1.00 0.00 100 0.0 600.0 0.0 DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED VFD-F 系列 時間 a 10-10 0A10H 回授訊號錯誤處理 00:警告且減速停車 01:警告且自由停車 02:警告並繼續運轉 (不偵測) 01 11 風機、水泵控制參數 參數 通訊 參數功能 代號 位址 11-00 0B00H V/F 曲線選擇 11-01 11-02 11-03 11-04 11-05 11-06 11-07 設定範圍 00:由參數群 01 設定 01:1.5 次方 02:1.7 次方 03:2 次方 04:3 次方 0B01H 循環控制 00:無功能 01:定時循環(依時間) 02:定量循環(依 PID) 0B02H 多組電機控制 01∼04 0B03H 定時循環時間設定 00∼65500 Min 0B04H 循環控制電機切換 0.0∼3600.0 s 延遲時間 0B05H 定量循環電機切換 0.0 to 3600.0 s 延遲時間 0B06H 定量循環電機切換 0.00 to 120.00 Hz 頻率 0B07H 進入睡眠程序時間 0.0 to 3600.0 s 11-08 0B08H 睡眠程序之睡眠頻 0.00 to 11-09(wake-up freq) 率 11-09 0B09H 睡眠程序之喚醒頻 0.00 to 120.0 Hz 率 11-10 0B0AH 定量循環故障處理 00:關閉所有輸出 01:市電驅動之電機繼續運轉 6-13 客戶 出廠設定 設定 00 00 01 00 1.0 10.0 60.00 0.0 (OFF) 0.00 0.00 00 第 六 章 VFD-F 系列 第七章 錯誤訊息指示與故障排除 交流電機驅動器本身有過電壓、低電壓及過電流等多項警示訊息及保護功能,一旦異常故障發 生,保護功能動作,交流電機驅動器停止輸出,異常接點動作,電機自由運轉停止。請依交流電 機驅動器之異常顯示內容對照其異常原因及處置方法。異常記錄會儲存在交流電機驅動器內部記 憶體(可記錄最近四次異常訊息),並可經參數讀取由數字操作面板或通訊讀出。 請注意:異常發生後,必須先將異常狀況排除後 5 秒,按 RESET 鍵才有效。 異常發生及排除方法 顯示符號 異常現象說明 排除方法 交流電機驅動器偵測輸出側有 檢查電機額定與交流電機驅動器額定是否相 異常突增的過電流產生 匹配 檢查交流電機驅動器U/T1-V/T2-W/T3間有無 短路 檢查與電機連接線是否有短路現象或接地 檢查交流電機驅動器與電機的螺絲有無鬆動 加長加速時間 檢查是否電機是否有超額負載 交流電機驅動器偵測內部直流 檢查輸入電壓是否在交流電機驅動器額定輸 高壓側有過電壓現象產生 入電壓範圍內,並監測是否有突波電壓產生 若是由於電機慣量回升電壓,造成交流電機驅 動器內部直流高壓側電壓過高,此時可加長減 速間或加裝煞車電阻(選用) 交流電機驅動器偵測內部溫度 檢查環境溫度是否過高 過高,超過保護位準 檢查散熱片是否有異物.風扇有無轉動 檢查交流電機驅動器通風空間是否足夠 交流電機驅動器內部直流高壓 檢查輸入電源電壓是否正常 側過低 檢查負載是否有突然的重載 是否三相機種單相電源入力或欠相 輸出電流超過交流電機驅動器 可承受的電流,若輸出120%的 檢查電機否過負載 交流電機驅動器額定電流,可 減低 (07-02) 轉矩提升設定值 承受60秒。 增加交流電機驅動器輸出容量 7-1 第 七 章 VFD-F 系列 顯示符號 異常現象說明 處置方法 內部電子熱動電驛保護動作 檢查電機是否過載 檢查 (07-00) 電機額定電流值是否適當 檢查電子熱動電驛功能設定. 增加電機容量. 電機負載太大 檢查電機負載是否過大 檢查過轉矩檢出位準設定值(06-03 ~ 06-05) 控制器保護線路異常 (有HPF.1,HPF.2,HPF.3三種) 送回原廠 加速中過電流 檢查交流電機驅動器與電機的螺絲有無鬆動 檢查U/T1-V/T2-W/T3到電機之配線是否絕緣 不良 增加加速時間 減低 (7-02) 轉矩提升設定值 更換較大輸出容量交流電機驅動器 減速中過電流產生 檢查U/T1-V/T2-W/T3到電機之配線是否絕緣 不良 減速時間加長 更換大輸出容量交流電機驅動器 運轉中過電流產生 檢查U/T1-V/T2-W/T3到電機之配線是否絕緣 不良 檢查電機是否堵轉 更換大輸出容量交流電機驅動器 當外部EF端子閉合時,交流電 清除故障來源後按”RESET”鍵即可 機驅動器停止輸出 當外部多功能輸入端子(MI1~ MI6)設定緊急停止時,交流電 清除故障來源後按”RESET”鍵即可 機驅動器停止輸出 內部記憶體IC資料寫入異常 送廠維修 內部記憶體IC資料讀出異常 按下RESET鍵將參數重置為出廠設定 若方法無效,則送廠維修 交流電機驅動器偵測線路異常 (有CF3.1~CF3.7七種) 送廠維修 7-2 顯示符號 異常現象說明 處置方法 接地保護線路動作。當交流電 檢查與電機連線是否有短路現象或接地 機驅動器偵測到輸出端接地且 確定IGBT功率模組是否損壞 接地電流高於交流電機驅動器 額定電流的50%以上。注意:此 檢查輸出側接線是否絕緣不良 保護係針對交流電機驅動器而 非人體。 當外部多功能輸入端子(MI1~ MI6)設定此一功能時,交流電機 清除信號來源”bb”立刻消失 驅動器停止輸出 自動加減速模式失敗 交流電機驅動器與電機匹配是否恰當 負載回升慣量過大 負載變化過於急驟 通信異常 檢查通訊信號有無反接(RJ11) 檢查通訊格式是否正確 軟體保護啟動 顯示Ccode送廠維修 顯示Pcode為密碼鎖定 模擬回授錯誤 模擬回授信號錯誤 檢查參數設定(Pr 10-00)和模擬或電腦的 線路 檢查系統反應時間回授信號偵測時間之間 的所有可能發生的錯誤(Pr 10-08) 7-3 第 七 章 第八章 VFD-F 系列標準規格 輸入電壓等級 460V 型號 VFD- F43A 055 075 110 150 185 220 300 370 450 550 750 900 1100 1320 適用電機功率(kW) 5.5 7.5 11 15 18.5 22 30 37 45 55 75 90 110 132 適用電機功率(HP) 7.5 10 15 20 25 30 40 50 60 75 100 125 150 175 10 14 18 25 29 34 46 56 69 84 114 137 168 198 13 18 24 32 38 45 60 73 91 110 150 180 220 260 額定輸出容量(kVA) 輸 額定輸出電流(A) 最大輸出電壓(V) 出 輸出頻率範圍(Hz) 載波頻率範圍(kHz) 三相對應輸入電壓 0.10~120.00Hz 4~10 3~9 2~6 三相電源 342~528V 電 容許輸入電壓變動範圍 源 容許電源頻率變動 控制方式 控 47~63Hz 正弦波 PWM 方式(載波頻率 2~10kHz)V/F 控制 輸出頻率解析度 制 轉矩特性 過負載耐量 特 加速、減速時間 性 V/F 曲線 失速防止動作位準 0.01Hz 具轉矩補償、轉差補償,啟動轉矩在 1.0Hz 時可達 150%以上 額定輸出電流的 120%,一分鐘 1~36000/0.1~3600.0/0.01~360.00 秒(可分別獨立設定) 任意 V/F 曲線設定 以額定電流百分比設定,20~150% 面板操作 運 頻率設 定信號 外部信號 運轉設 面板操作 轉 定信號 外部信號 特 多功能輸入信號 性 多功能輸出信號 模擬輸出信號 *1~3(暫定) 由 ▲▼鍵設定 1 組 AVI 模擬電壓 DC0~+10V/0~+5V,2 組 ACI 模擬電流 0/4~20mA,15 個預設頻率(多功 能輸入選擇端子)、通訊 RS-485(Modbus) 、外部端子 UP/DOWN Key 由 RUN,STOP,JOG 鍵設定 FWD、REV、JOG 運轉;通訊運轉 多段速指令 0~15 選擇,加減速禁止指令,4 段加減速切換、外部 B.B.(NC,NO)選擇、JOG, 輔助機啟動/保養 運轉中,運轉頻率到達,設定頻率到達,零速,B.B.中,異常指示,輔助機輸出 LOCAL / REMOTE 指示 2 組模擬頻率/電流信號輸出 其它功能 AVR,S-曲線,過電壓、過電流失速防止,異常記錄檢查,反轉禁止,直流制動 瞬時停電再啟動,自動轉矩補償、轉差補償,PID 回授控制,密碼參數鎖定/重置 頻率上下限設定,工頻/變頻切換運轉,載波頻率調整、4 組風機水泵控制 保護功能 過電壓、過電流、低電壓、過負載限制、電子熱電驛、過熱、自我測試、接地保護、 異常接點輸入、低電流 冷卻方式 強制風冷 使用場所 環 環境溫度 高度 1000m 以下,室內(無腐蝕性氣體、液體、無塵垢) -10℃ ~ 40℃(無結露且無結凍) 保存溫度 境 濕度 振動 -20℃ ~ 60℃ 90%RH 以下(無結露) 20Hz 以下 9.80665m/s2(1G) 20 ~ 50Hz 5.88m/s2(0.6G) * 此為暫定規格 8-1 第 八 章 電 壓 第九章 煞車電阻選用一覽表 適用電機 *1 全載 輸出轉 應用電阻規格 HP kW 矩 kG-M 7.5 4 6 0 V 系 列 5.5 3.111 制動單元 型式 用 VFDB 量 制動電阻 料號 BR500W100 500W 100Ω 制動轉矩 用 10% ED% 最小電 量 阻值 1 125 60Ω 125 45Ω 10 7.5 4.148 1000W 75Ω BR1K0W075 1 15 11 6.186 1000W 50Ω BR1K0W050 1 125 50Ω 20 15 8.248 1500W 40Ω 4030 1 BR1K5W040 1 125 40Ω 18.5 10.281 4800W 32Ω 4030 1 BR1K2W008 4 125 32Ω 25 30 22 12.338 4800W 27.2Ω 4030 1 BR1K2W6P8 4 125 27.2Ω 40 30 16.497 6000W 20Ω 4030 1 BR1K5W005 4 125 20Ω 50 37 20.6 9600W 16Ω 4045 1 BR1K2W008 8 125 16Ω 60 45 24.745 9600W 13.6Ω 4045 1 BR1K2W6P8 8 125 13.6Ω 75 55 31.11 12000W 10Ω 4030 2 BR1K5W005 8 125 10Ω 100 75 42.7 19200W 6.8Ω 4045 2 BR1K2W6P8 16 125 6.8Ω 19200W 6.8Ω 2 1 BR1K2W6P8 16 100 3.4Ω 2 1 BR1K5W005 12 100 3.4Ω 2 1 BR1K2W6P8 32 160 3.4Ω 120 90 150 110 175 132 52.5 61 71.5 18000W 6.7Ω 38400W 3.4Ω * 4220 * 4220 * 4220 *1:標準 4 極電機 *2:開發中 注意事項: 1. 請選擇本公司所制定的電阻值瓦特數及使用的頻率(ED%)。 2. 若使用非本公司所提供的煞車電阻及制動模組而導致驅動器或其它設備損壞,本公司則不負 擔保固期的責任。 3. 煞車電阻的安裝務必考慮周圍環境的安全性、易燃性。 4. 若要使用最小電阻值時,瓦特數的計算請與代理商洽談。 第 九 章 9-1